




 广告
广告





















































中国参加自动驾驶功能要求及测试评价方法会议
2020-01-22 00:48:49· 来源:5G智联车

2020年1月14至17日,联合国自动驾驶与网联车辆工作组功能要求非正式工作组(WP.29/GRVA/FRAV)第二次会议、自动驾驶测试评价方法非正式工作组(WP.29/GRVA/VMAD
2020年1月14至17日,联合国自动驾驶与网联车辆工作组功能要求非正式工作组(WP.29/GRVA/FRAV)第二次会议、自动驾驶测试评价方法非正式工作组(WP.29/GRVA/VMAD)第五次会议在日本东京举行。来自中国、日本、韩国、美国、德国、英国、法国、荷兰等成员国的的80余名专家参加了本次会议。中国汽车技术研究中心有限公司孙航、赵帅、王霁宇、上海机动车检测中心曹建永、华为技术有限公司高永强等五人代表中国参会。

在1月14至15日召开的FRAV第二次会议上,主要回顾和审议了其第一次会议中确定的工作范畴和职责划分,并在此基础上围绕自动驾驶功能要求相关内容展开协调。会议讨论并初步确定采用《联合国1998年协定书》中规定的SR.1车型分类体系对自动驾驶车辆进行分类;讨论了欧盟组织制定的自动驾驶安全要素列表,并分析、对比和提炼相关核心内容用于完善自动驾驶功能技术要求;会议还重点围绕由中、德、美三国联合主席共同起草的“自动驾驶功能要求”概念文件进行了讨论,经讨论,会议最终确定该文件的基础结构并明确文件涉及的若干重要概念,包括自动驾驶定义、系统安全、设计运行范围、OEDR,横/纵向控制、人机界面、失效响应和最小风险状态等要求,根据协调情况形成了向GRVA进行汇报的结论性内容。
在1月16日至17日召开的VMAD第五次会议上,主要按照各任务组分工,分别对1a任务组(交通场景)、2a任务组(审核评估、虚拟测试和在用车报告)以及2b任务组(场地和实际道路测试)的研究结果进行确认并针对其中的核心问题展开协调。根据联合国《自动驾驶汽车框架文件》的工作安排,VMAD分析和对比了与自动转向控制功能非正式工作组(ACSF)研究制定的自动车道保持系统(ALKS)功能要求的技术内容差异,并确定由VMAD与ACSF继续协调相关测试方法;会议讨论了可/不可预见场景和可/不可预防场景等基础概念,并对有关自动驾驶产品审核评估、虚拟仿真、场地测试、实际交通环境测试以及在用车报告、用户培训等阶段性研究结果进行了汇总分析,形成了向GRVA进行汇报的结论性内容。
中国代表团在本次会议召开之前先后组织两次准备会对相关提案进行研究,作为FRAV联合主席国参与起草《自动驾驶功能要求》概念文件,向本次会议提交有关“设计运行条件”要求和“主、客观方法相结合的实际道路测试评价方法”等多项提案,在会议过程中就重点议题积极发表观点,与意见相关方持续开展沟通,力争中国提案得到采纳。中国汽车技术研究中心有限公司作为C-WP.29秘书处挂靠单位,将继续组织我国骨干单位专家参与联合国有关自动驾驶标准法规制定工作,根据我国汽车产业实际情况和发展特点积极与国际法规制定组织展开协调。
在1月14至15日召开的FRAV第二次会议上,主要回顾和审议了其第一次会议中确定的工作范畴和职责划分,并在此基础上围绕自动驾驶功能要求相关内容展开协调。会议讨论并初步确定采用《联合国1998年协定书》中规定的SR.1车型分类体系对自动驾驶车辆进行分类;讨论了欧盟组织制定的自动驾驶安全要素列表,并分析、对比和提炼相关核心内容用于完善自动驾驶功能技术要求;会议还重点围绕由中、德、美三国联合主席共同起草的“自动驾驶功能要求”概念文件进行了讨论,经讨论,会议最终确定该文件的基础结构并明确文件涉及的若干重要概念,包括自动驾驶定义、系统安全、设计运行范围、OEDR,横/纵向控制、人机界面、失效响应和最小风险状态等要求,根据协调情况形成了向GRVA进行汇报的结论性内容。
在1月16日至17日召开的VMAD第五次会议上,主要按照各任务组分工,分别对1a任务组(交通场景)、2a任务组(审核评估、虚拟测试和在用车报告)以及2b任务组(场地和实际道路测试)的研究结果进行确认并针对其中的核心问题展开协调。根据联合国《自动驾驶汽车框架文件》的工作安排,VMAD分析和对比了与自动转向控制功能非正式工作组(ACSF)研究制定的自动车道保持系统(ALKS)功能要求的技术内容差异,并确定由VMAD与ACSF继续协调相关测试方法;会议讨论了可/不可预见场景和可/不可预防场景等基础概念,并对有关自动驾驶产品审核评估、虚拟仿真、场地测试、实际交通环境测试以及在用车报告、用户培训等阶段性研究结果进行了汇总分析,形成了向GRVA进行汇报的结论性内容。
中国代表团在本次会议召开之前先后组织两次准备会对相关提案进行研究,作为FRAV联合主席国参与起草《自动驾驶功能要求》概念文件,向本次会议提交有关“设计运行条件”要求和“主、客观方法相结合的实际道路测试评价方法”等多项提案,在会议过程中就重点议题积极发表观点,与意见相关方持续开展沟通,力争中国提案得到采纳。中国汽车技术研究中心有限公司作为C-WP.29秘书处挂靠单位,将继续组织我国骨干单位专家参与联合国有关自动驾驶标准法规制定工作,根据我国汽车产业实际情况和发展特点积极与国际法规制定组织展开协调。



 广告
广告 编辑推荐


最新资讯
-
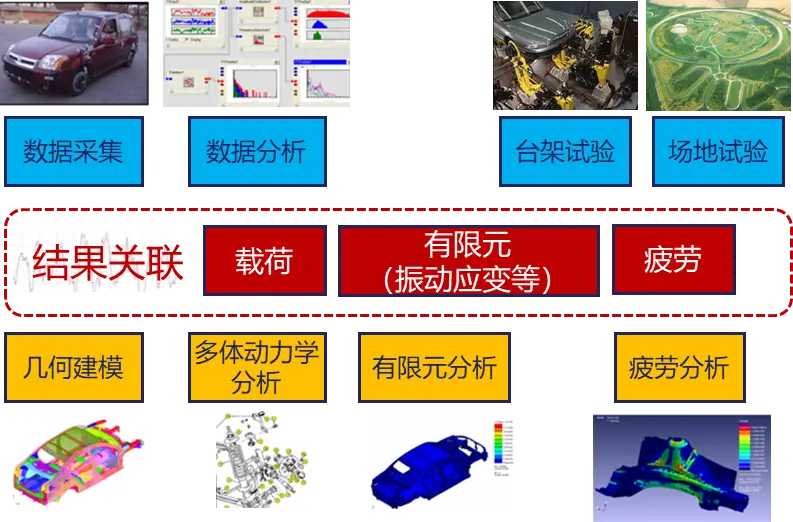
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
