




 广告
广告





















































混合动力系统发动机工况切换特性研究
2019-10-08 23:51:15· 来源:内燃机学报

混合动力汽车是解决目前汽车能量利用率低与尾气污染问题的重要途径,混合动力系统的辅助功率单元(APU)是给动力电池充电或直接驱动电机的关键部分。为进一步提
混合动力汽车是解决目前汽车能量利用率低与尾气污染问题的重要途径,混合动力系统的辅助功率单元(APU)是给动力电池充电或直接驱动电机的关键部分。为进一步提高增程式混合动力汽车续驶里程,使发动机在最佳工况下工作,研究APU控制策略是重要的方法之一。
增程式混合动力系统模式切换过程的快速性、平顺性直接关乎整车的能耗、排放及舒适性,而动态过程控制的目的正是为了解决在混合动力模式切换过程中,各转动部件之间耦合时出现的动力输出不平稳或转矩不足和超调等问题。该文通过增程式混合动力系统台架试验,基于精确转矩的动态协调控制系统,研究“发动机-发电机”系统的快速切换性能,期望切换过程中APU系统始终处在最低油耗区,并保持发动机较小的转速和转矩超调量。
01、APU工况点的选取
该文以某款D19增压中冷柴油机为研究对象,其排量为1.85L,最大功率为70kW。在图1中,每个最低等效燃油消耗点连起来形成的曲线,即APU系统的最佳工作曲线,选取3个最佳工况点:A点(1500rpm,85N·m)、B点(2420rpm,185N·m)和C点(2785rpm,222N·m)。控制逻辑表如表1所示,其中,C为荷电状态。

图1 APU等效燃油消耗率MAP图
表1 APU工况点控制逻辑表

02
试验系统及方案

本试验的主要目的是利用台架对APU控制策略进行研究,试验系统如图2所示。APU主要的工作切换过程有:(1)起动→发动机怠速工况点;(2)怠速工况工况点→A工况点;(3)A工况点→B工况点;(4)B工况点→C工况点;(5)C工况点→B工况点;(5)B工况点→A工况点。
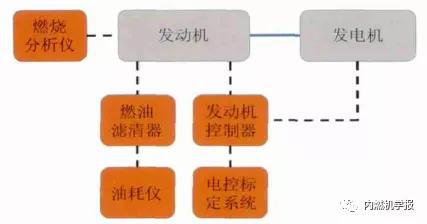
图2 试验方案图
03、试验过程及讨论
3.1启动过程
起动过程试验方案:对比3个目标怠速转速(950rpm、1200rpm、1500rpm)及4组不同喷油策略(正常喷油、0-200rpm时不喷油、0-200rpm时按照50N·m喷油、0-200rpm时按照100N·m喷油)下APU的起动过程。试验发现,可以通过提高发动机怠速转速的方法加快暖机过程,而且不会引起起动过慢的问题,而且为了降低系统的油耗,可以在发动机起动初期适当降低喷油量甚至断油,而不会影响发动机的起动性能。
3.2 怠速切换到A点
系统在稳态工作时,使用的是比例积分(PI)控制器。怠速、A工况点采用的P参数均为0.4、I参数均为0.1,该过程APU轴系加速转矩、动力学特性分别如图3、4所示。
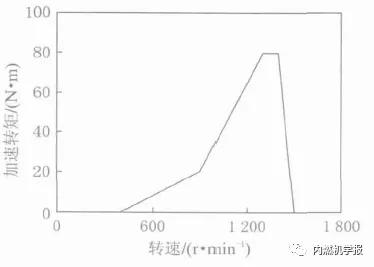
图3 怠速到A工况点切换过程加速转矩
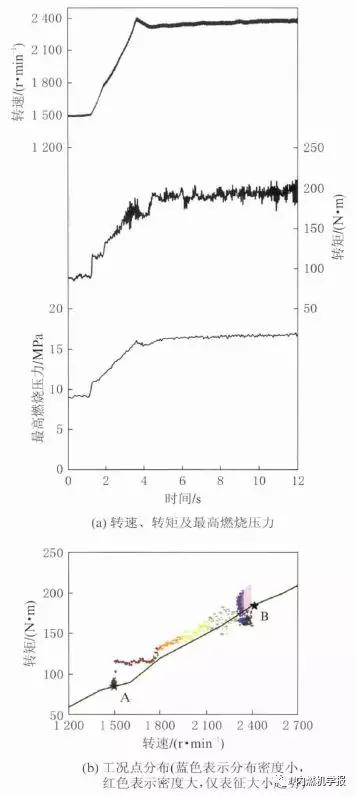
图4 怠速到A工况点切换过程动力学特性
由图4可以看到,0-2.5s时,发动机在怠速工况下稳定运行,油门开度为0,喷油量为7mg/cycle。在2.5s时刻,发动机油门开度开始逐渐增加,发动机喷油量和缸内最高燃烧压力随着发动机油门开度增加而增加。APU轴系的转速迅速增加到1450rpm,此时进入A工况点PI调节。整体来看:APU系统运行平稳,运行工况点基本分布在最佳等效油耗曲线附近;切换过程用时也很短,只有约2.5s;转速几乎没有超调,转矩超调量约为15N·m。
3.3 A点切换到B点
A、B工况点采用的P参数均为0.4、I参数均为0.05,该过程APU轴系加速转矩、动力学特性分别如图5、6所示。在0-1.2s期间,APU系统在A工况点稳定工作,发动机实际转速稳定在1500rpm,转矩稳定在85N·m,最高燃烧压力稳定在9MPa左右,喷油量稳定在21mg/cycle,说明A工况点PI控制效果良好。在1.2s时刻,混合动力控制器(HCU)开始从PI控制调整到基于转矩模型的动态协调控制,HCU向ECU发送的虚拟油门信号迅速上升,各项参数随之上升。在1.2-3.7s内,APU轴系几乎匀加速上升,转矩也随之上升。整个加速过程APU工况点基本分布在最佳等效油耗曲线附近,切换过程表现良好。在3.7s时,HCU切换控制程序到PI控制,系统在B工况点稳定运行。切换过程中,APU系统的功率变化量为33.53kW,功率变化率为13.4 kW/s,转速超调量约为20rpm,转矩超调量约为20 N·m。

图5 A到B工况点切换过程动力学特性
图6 A到B工况点切换过程动力学特性
3.4 B点切换到C点
C工况点采用的P、I参数分别为0.4、0.05,该过程APU轴系加速转矩、动力学特性分别如图7、8所示。在0-1.4s期间,APU系统在B工况点稳定工作,发动机实际转速稳定在2420rpm,转矩稳定在185N·m,最高燃烧压力稳定在17MPa左右,喷油量稳定在40mg/cycle,这说明B工况点PI控制效果良好。在1.4s时刻,系统从B工况点稳定运行模式转变到动态切换阶段,HCU向发动机ECU发送的虚拟油门信号迅速增加,喷油量也随之增加,发动机输出转矩增大,整个切换过程APU工况点基本分布在最佳等效油耗曲线附近,切换过程表现良好。在2.0s时刻,HCU切换控制程序到PI控制, C工况点各项参数基本稳定。切换过程中,APU系统的功率变化率为29.77kW/s,转速超调量约为15rpm,转矩超调量约为10 N·m。
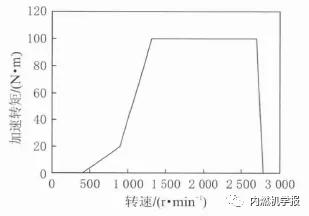
图7 B到C工况点切换过程加速转矩
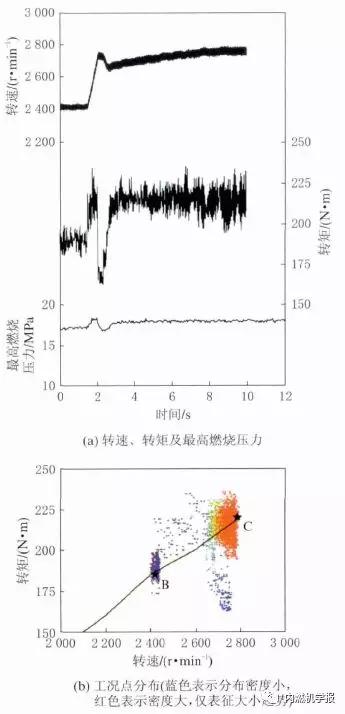
图8 B到C工况点切换过程动力学特性
3.5 C切换到B点
C工况点到B工况点的切换属于减载切换,发动机转矩小于发电机转矩,APU轴系做减速减转矩运动。该过程APU轴系减速转矩、动力学特性分别如图9、10所示。在0-2.5s期间,APU系统在C工况点稳定工作,发动机实际转速稳定在2785rpm,上下波动范围为20rpm,转矩稳定约222N·m,波动范围为15N·m,最高燃烧压力稳定在18MPa左右,喷油量稳定在42mg/cycle,这说明C工况点PI控制效果良好。在2.5s时刻,HCU向ECU发送虚拟油门信号突降,喷油量突然下降到28mg/cycle,APU几乎匀减速下降,在3.3s进入PI控制。2.5~3.3s内,转矩与转速几乎同步下降,整个切换过程APU工况点基本分布于等效燃油消耗曲线下方,与切换要求基本一致。切换过程用时1.5s,功率变化率为-11.9kW/s,转速超调量约为150rpm,转矩超调量约为35N·m。
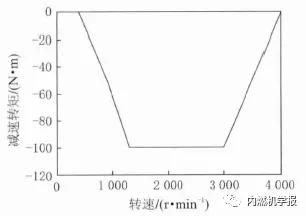
图9 C到B工况点切换过程减速转矩

图10 C到B工况点切换过程动力学特性
3.6 B切换到A点
B工况点到A工况点的切换过程的APU轴系减速转矩、动力学特性分别如图11、12所示。在0-2s期间,APU系统在B工况点稳定工作,发动机实际转速稳定在2420rpm,上下波动范围为±20rpm,转矩稳定约185N·m,波动范围为±10N·m,最高燃烧压力稳定在17MPa左右,喷油量稳定在40mg/cycle,这说明B工况点PI控制效果良好。在第2s,HCU向ECU发送虚拟油门信号,喷油量突然下降到23 mg/cycle,最高燃烧压力突降至14.4MPa,整个切换过程APU工况点基本分布于等效燃油消耗曲线下方,与切换要求基本一致。切换过程中,APU系统的切换用时1s,功率变化率为-33.5kW/s,转速超调量约为80rpm,转矩超调量约为10N·m。
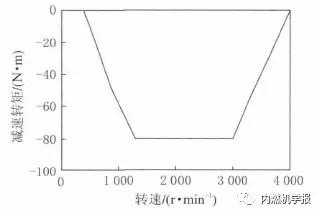
图11 B到A工况点切换过程减速转矩

图12 B到A工况点切换过程动力学特性
04、结论
(1)文中提出的基于转矩模型的动态协调控制策略能够保证APU系统在发动机工况切换时基本沿着最佳等效燃油消耗线运行。
(2)工况点之间切换用时最低约为0.6s,APU系统的最低功率变化率为29.77kW/s,切换过程的响应较迅速。
(3)整个过程中发动机转速最大超调量约为150rpm,与最大转速之比为5.4%;转矩最大超调量约为35N`m,与最大转矩之比为15.7%。整个过程中转速和转矩超调量较低。
文献来源及推荐阅读
[1] 谭丕强,黄震宇,胡志远,楼狄明. 混合动力系统发动机工况切换特性研究[J].内燃机工程,2019,40(4):33-41. - 下一篇:百度的无人驾驶系统原来是这样的!
- 上一篇:无人驾驶最大的拦路虎——激光雷达



 广告
广告 编辑推荐




最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
