




 广告
广告





















































谈谈无人车横向控制
2018-03-12 22:36:14· 来源:佐思汽车研究

单从技术角度来看,传统车厂的优势在于控制层和执行层,是基于硬件的,靠几十年机械领域的经验累积起来的一道宽宽的护城河。这是一个体系,不是靠某几个技术大拿建立起来的。科技类厂商和新兴业者的优势在于感知层和决策层,是基于软件的,科技类厂商和新兴业者拥有远超传统车厂的软件人才,特别是高素质软件人才。
单从技术角度来看,传统车厂的优势在于控制层和执行层,是基于硬件的,靠几十年机械领域的经验累积起来的一道宽宽的护城河。这是一个体系,不是靠某几个技术大拿建立起来的。科技类厂商和新兴业者的优势在于感知层和决策层,是基于软件的,科技类厂商和新兴业者拥有远超传统车厂的软件人才,特别是高素质软件人才。但无人车终究是车,执行层是最底层,是一道科技类厂商和新兴业者数年内无法翻越的门槛。而对传统车厂来说,软件领域的短板也需要靠时间来慢慢弥补。
无人车不仅要做到安全,还要舒适,而后一点是科技类厂商和新兴业者最难做到的,对传统车厂来说则非常轻松。科技类厂商和新兴业者对成本和经济性的重视度不够,他们习惯了大把烧钱,而传统车厂非常在意成本和经济性。传统车厂对元件或系统的可靠性高度重视,花大量的时间达到车规,并且内部测试也花很长的时间。科技类厂家则追求快鱼吃慢鱼,执行战略相对激进,缺乏严格的测试流程和车规级认证。
无人车的横向控制是无人车的核心技术之一,关系到无人车的安全、舒适和经济性,尤其是舒适性。由于没有TIER1的支持,科技类和新兴造车企业缺乏对横向控制的深入研究能力。科技类企业不太清楚电动助力转向EPS系统特性,经常出现方向打死的状态,原因就是与EPS厂家缺乏协同开发,小半径弯道理论上尚能应付(实际体验不太好),大半径转弯就更难了。特别是无人车初创公司,根本得不到EPS厂家的足够支持。而通用之类的传统车厂则一开始就与EPS厂家深度合作,所以在横向控制上优于IT造车企业。实际上,即使整车厂也不掌握横向控制话语权,EPS厂家才有话语权。全球EPS市场集中度极高,特别是欧洲,博世几乎垄断了欧洲EPS市场。
车辆横向控制的设计有三种方法:第一种是完全基于控制层的上一级动作规划(Motion Planning)控制,没有考虑到道路几何特性,通常用PID做反馈控制。第二种是基于模仿驾驶员行为,最后一种是基于车辆动力学模型和控制理论。后两种也可融合使用。前两种方法不需要车辆动力学的精确知识,仅需要一个表达响应特性的车辆模型和一个模拟驾驶员行为的控制器。后一种方法通常需要一个较好的车辆动力学模型,然后用不同的控制算法来达到特定目标。
此外,行驶的汽车是一个复杂的强耦合、变参数的非线性系统,其纵向、横向运动是相互耦合、相互影响的,特别是车辆在不平路面上高速行驶时,其耦合特性更加明显。目前初创企业的车辆纵向、横向控制往往是通过两个独立的控制器完成的,高速、弯道、坡道下表现较差。
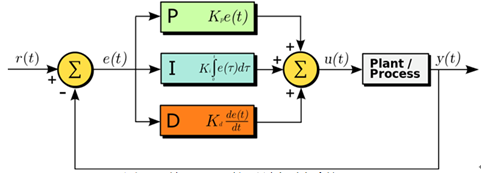
PID控制器(比例-积分-微分控制器)由比例单元P、积分单元I和微分单元D组成。PID控制的基础是比例控制;积分控制可消除稳态误差,但可能增加超调;微分控制可加快大惯性系统响应速度以及减弱超调趋势。PID控制在工业领域应用广泛,参数少,简单易用,消耗运算很少,成本极低。上图中,δ∈[δmin,δmax]为满足车辆动态姿态限制的方向盘转角,Vr∈[δmin,δmax]为前向速度。而对这些状态量的控制可以是一个典型的PID反馈控制系统。其中e(t)代表当前的跟踪误差,而这个跟踪的变量误差可以是轨迹的纵向/横向误差,角度/曲率误差或者是若干车辆姿态状态变量的综合误差。其中P控制器代表对当前误差的反馈,其增益由KP控制;I和D控制器分别代表积分项和微分项,其增益分别有KI和KD来控制。控制车辆尽可能遵循上游动作规划(Motion Planning)所输出的时空轨迹。可以使用两个基于PID反馈控制的控制器来分别控制方向盘转角δ以及前进速度Vs。
PID法缺点很明显,难以有效地应用于多变量系统和时变系统,基本上没有考虑道路特性,只能应用于低速,小半径弯道,且容易出现振荡,特别是在弯道后期,方向盘容易出现抖动。高速或大半径弯道则会出现偏离度很大,急拐。舒适性极差。
第二种方法以预瞄跟随理论最为常见,预瞄跟随理论是一种人车路的闭环理论,由我国郭孔辉院士在1982年提出,人类驾驶员在开车时,会在前方道路上选定一个要达到的点,这个点称之为预瞄点,车与预瞄点之间的距离为预瞄距离。驾驶员通过对车辆的操控到达预瞄点,再选定新的预瞄点,这就是人类驾驶员的驾驶行为。
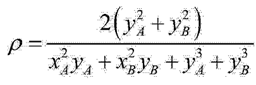
首先,建立驾驶员相对坐标系。因为驾驶员总是以与汽车自身方向相一致的相对坐标来观测前方道路,为此先将道路在绝对坐标下的轨迹函数转换成反映于驾驶员相对坐标系下的道路函数,由连续两个预瞄点A和B的坐标位置计算出最佳转弯曲率。
再由下式计算出方向盘转角量
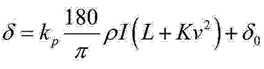
其中I为车辆转向系统比,L为车辆轴距,K为车辆不足转换系数,δ0为方向盘零位偏移,κp为调节动态性能的增益系数,ν为车辆纵向速度。
预瞄跟随法考虑到了道路的几何特性,这种几何特性的输入一般称之为前馈,它当然可以用PID来控制误差,一般是控制横向误差。预瞄控制法依赖预瞄点的选择,大部分时候预瞄距离是个固定的经验值,也有少数自适应预瞄距离的研究,这就限制了其灵活性,小半径和低速下表现良好,高速和大弯道下还需要进一步研究增强。
最后是基于车辆动力学详细模型的。横向控制研究最初是由美国通用汽车公司和美国无线电公司在 20 世纪 50 年代末合作开展的,通用是在此领域研究最深入的厂家。
我们来看通用汽车在无人车横向控制领域的一项专利,这项专利是一种为沿车行道行进的自动驾驶或半自动驾驶车辆提供横向转向控制的方法。在自动驾驶或半自动驾驶车辆中车道居中、车道保持、车道变换、碰撞紧急转向等都需要车辆自主的横向控制。这种方法是建立一个车辆动力学模型,车辆动力学数学模型包括状态变量、转向控制变量和前方道路扰动系数,所述前方道路扰动系数定义所述车行道的曲率、倾斜度和坡度;使用所述转向控制变量确定缩小当前车辆路径和期望车辆路径之间的差异的转向控制目标;使用所述数学模型确定最优转向控制信号,所述控制信号提供所述转向控制目标且包括反馈部分和前馈部分,其中所述前馈部分包括所述道路扰动系数;以及将所述控制信号提供给转向控制器。
简单地说就是依据高正确度(或者高精确度)地图提供的道路曲率、倾斜度和坡度,得出一个体感舒适的转向控制角度和转向控制角速度。这种方法是最低成本的高速公路型无人驾驶,在现有的L2级系统上基本不增加硬件即可实现。当然,车道线级定位还是难点。
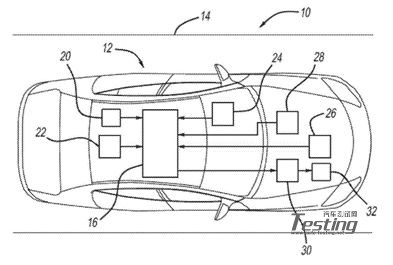
上图中,16代表无人车的控制模块,20为地图数据库,22为导航系统,24为GPS单元,28为车辆动力学模型。26为传感器,检测车道线与车道标识。30为车辆横向控制器,32为车辆横向执行器即EPS,电动助力转向。
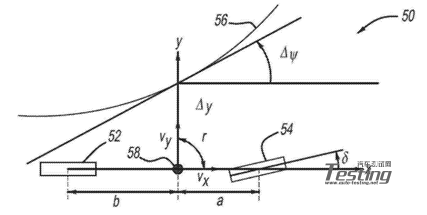
上图为单轨自行车模型,52与54是车轮,58为车辆重心,56为道路边界。
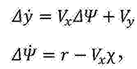
其中△y为车辆重心与车道的横向偏移量(车道偏移量),△Ψ为相对于车道的偏移角度。单轨经典自行车模型如下


Vy为车辆横向速度,r为车辆横摆角速度,Vx为车辆纵向速度,Cf和Cr分别为前后桥的侧偏刚度,a为车辆重心至车辆前桥的距离,b为车辆重心至车辆后桥的距离, M为车辆的质量,Iz为车辆12的惯性横摆力矩,x为路径曲率,为前车轮角度。
当然要不嫌麻烦的话还有4自由度、6自由度甚至17自由度模型。
定义X为角度状态变量。对无法深入车辆底层的厂家来说,X就是EPS角度接口,对传统车厂则下沉一层到EPS的扭矩接口。如果是角度接口,那么 ,如果是扭矩接口,那么
,如果是扭矩接口,那么 。
。
状态变量X的导数就是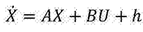 。U为转向控制变量,如果是角度接口,那么U就是前轮转向角度、差动制动(可能没有)、后轮转向角度。对于扭矩接口,则为前轮扭矩、横摆力矩和后轮转向角度,h为道路扰动系数。对于角度接口,
。U为转向控制变量,如果是角度接口,那么U就是前轮转向角度、差动制动(可能没有)、后轮转向角度。对于扭矩接口,则为前轮扭矩、横摆力矩和后轮转向角度,h为道路扰动系数。对于角度接口,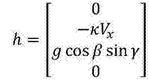 ,对于扭矩接口,
,对于扭矩接口,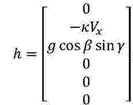 。其中k为道路曲率,γ为路面倾斜度以及β为路面坡度。
。其中k为道路曲率,γ为路面倾斜度以及β为路面坡度。
控制矩阵A为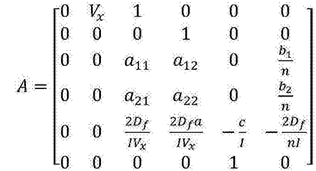
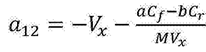
矩阵B为 。其中
。其中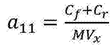 ,
, ,
, ,
, ,
, ,
, 。
。
对于后轮可转向的车辆,B就是两列,卡迪拉克的CT6就具备后轮转向功能。
得到数学模型化后,下一步就是用最小二次代价函数法求得函数J的控制变量U,以此最小化期望路径与实际路径之间的误差。车辆的在任何时刻k的规划路径(或参考轨迹)是一组点rk+j,j = 1, 2,......,p。每个点rk+j都是二维向量,其包括车辆重心的车道横向位置,且相对于车辆航向角A Ψ。设置点的数量由预测时域Tp = pTs,其中Ts是采样时间。数学模型的未来输出应遵循参考轨迹rk+j 。于采样时间k的状态变量Xk是已知的,求得s最优转向控制变量Uk的问题缩小至求得控制变量Uk中的二次函数J的全局最小值。这一问题可用标准的二次规划求解。
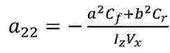
车辆跟随的行驶车道的弯道62,其中采样点66为车辆的当前位置,道路当前的曲率、倾斜度和坡度的扰动系数h(t),其中t为时间。在车辆沿弯道62的未来位置的采样点64的道路曲率、倾斜度和坡度定义为h (t+τ),h (t+2 τ),……,h (t+ητ),其中τ为时间变化。针对新的扰动系数h1,状态和控制变量X和U在线条68 示出的每个采样点64都转换为Xi和Ui。然后,采用MPC或LQ控制算法,其使用带新的状态和控制变量X1和U1的方程。
在卡迪拉克超级巡航中,纵向控制无需考虑,跟随前车速度即可,这就大大简化了系统。这种系统以对地图的依赖降低甚至消除了对车道线的依赖,看似L2+,实际比L3来得更先进,尤其是在中国更实用(中国塞车时经常出现不按车道线行驶,车道线经常被车辆遮盖,依赖车道线的塞车自动跟随相当难做)。这种系统再加上纵向控制算法和紧急转向算法,即可不增加硬件成本或少增加硬件成本情况下达到高速公路的无人驾驶,其价格完全能够为普通消费者接受。
传统车厂两条腿走路,一条是高速公路型的L4,注重成本,强调舒适性,目标客户是经常上高速的消费者,一条是城区低速型L4,面向网约车或共享出行市场。而初创企业往往只能做城区低速型L4。
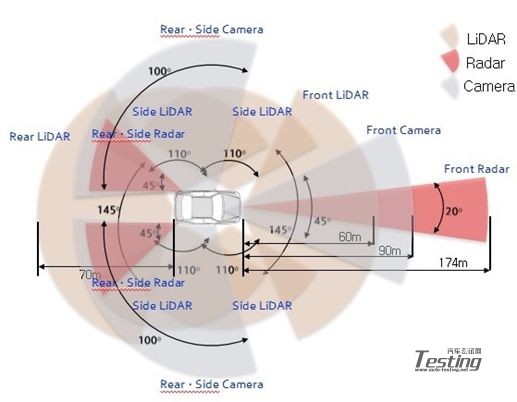
2018年2月5日,现代汽车自动驾驶测试车队以100km/h-110km/h的速度从韩国首尔行驶到平昌,在高速公路上成功地展示了Level 4级自动驾驶技术,行程总计188公里。完成此次测试的车队是由3辆现代燃料电池车Nexo和2辆Genesis G80组成,这些车辆都搭载了Level 4级自动驾驶系统和5G网络技术。
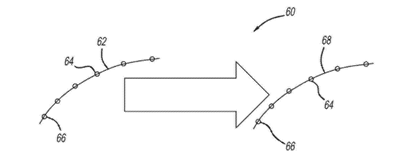
上图为NEXO的传感器布局, 前后激光雷达为法雷奥或IBEO的Scala,现代并未把距离标的很远,这款激光雷达已经由法雷奥量产。两侧激光雷达为IBEO的LUX。前毫米波雷达还是比较老的德尔福ESR2.5。两个侧后雷达可能是HELLA的24GHz毫米波雷达。一个双目摄像头,FOV为45度,有效距离达90米,可能使用了索尼的IMX390CQV传感器,像素达245万。一个单目摄像头。
无人车不仅要做到安全,还要舒适,而后一点是科技类厂商和新兴业者最难做到的,对传统车厂来说则非常轻松。科技类厂商和新兴业者对成本和经济性的重视度不够,他们习惯了大把烧钱,而传统车厂非常在意成本和经济性。传统车厂对元件或系统的可靠性高度重视,花大量的时间达到车规,并且内部测试也花很长的时间。科技类厂家则追求快鱼吃慢鱼,执行战略相对激进,缺乏严格的测试流程和车规级认证。
无人车的横向控制是无人车的核心技术之一,关系到无人车的安全、舒适和经济性,尤其是舒适性。由于没有TIER1的支持,科技类和新兴造车企业缺乏对横向控制的深入研究能力。科技类企业不太清楚电动助力转向EPS系统特性,经常出现方向打死的状态,原因就是与EPS厂家缺乏协同开发,小半径弯道理论上尚能应付(实际体验不太好),大半径转弯就更难了。特别是无人车初创公司,根本得不到EPS厂家的足够支持。而通用之类的传统车厂则一开始就与EPS厂家深度合作,所以在横向控制上优于IT造车企业。实际上,即使整车厂也不掌握横向控制话语权,EPS厂家才有话语权。全球EPS市场集中度极高,特别是欧洲,博世几乎垄断了欧洲EPS市场。
车辆横向控制的设计有三种方法:第一种是完全基于控制层的上一级动作规划(Motion Planning)控制,没有考虑到道路几何特性,通常用PID做反馈控制。第二种是基于模仿驾驶员行为,最后一种是基于车辆动力学模型和控制理论。后两种也可融合使用。前两种方法不需要车辆动力学的精确知识,仅需要一个表达响应特性的车辆模型和一个模拟驾驶员行为的控制器。后一种方法通常需要一个较好的车辆动力学模型,然后用不同的控制算法来达到特定目标。
此外,行驶的汽车是一个复杂的强耦合、变参数的非线性系统,其纵向、横向运动是相互耦合、相互影响的,特别是车辆在不平路面上高速行驶时,其耦合特性更加明显。目前初创企业的车辆纵向、横向控制往往是通过两个独立的控制器完成的,高速、弯道、坡道下表现较差。
PID控制器(比例-积分-微分控制器)由比例单元P、积分单元I和微分单元D组成。PID控制的基础是比例控制;积分控制可消除稳态误差,但可能增加超调;微分控制可加快大惯性系统响应速度以及减弱超调趋势。PID控制在工业领域应用广泛,参数少,简单易用,消耗运算很少,成本极低。上图中,δ∈[δmin,δmax]为满足车辆动态姿态限制的方向盘转角,Vr∈[δmin,δmax]为前向速度。而对这些状态量的控制可以是一个典型的PID反馈控制系统。其中e(t)代表当前的跟踪误差,而这个跟踪的变量误差可以是轨迹的纵向/横向误差,角度/曲率误差或者是若干车辆姿态状态变量的综合误差。其中P控制器代表对当前误差的反馈,其增益由KP控制;I和D控制器分别代表积分项和微分项,其增益分别有KI和KD来控制。控制车辆尽可能遵循上游动作规划(Motion Planning)所输出的时空轨迹。可以使用两个基于PID反馈控制的控制器来分别控制方向盘转角δ以及前进速度Vs。
PID法缺点很明显,难以有效地应用于多变量系统和时变系统,基本上没有考虑道路特性,只能应用于低速,小半径弯道,且容易出现振荡,特别是在弯道后期,方向盘容易出现抖动。高速或大半径弯道则会出现偏离度很大,急拐。舒适性极差。
第二种方法以预瞄跟随理论最为常见,预瞄跟随理论是一种人车路的闭环理论,由我国郭孔辉院士在1982年提出,人类驾驶员在开车时,会在前方道路上选定一个要达到的点,这个点称之为预瞄点,车与预瞄点之间的距离为预瞄距离。驾驶员通过对车辆的操控到达预瞄点,再选定新的预瞄点,这就是人类驾驶员的驾驶行为。
首先,建立驾驶员相对坐标系。因为驾驶员总是以与汽车自身方向相一致的相对坐标来观测前方道路,为此先将道路在绝对坐标下的轨迹函数转换成反映于驾驶员相对坐标系下的道路函数,由连续两个预瞄点A和B的坐标位置计算出最佳转弯曲率。
再由下式计算出方向盘转角量
其中I为车辆转向系统比,L为车辆轴距,K为车辆不足转换系数,δ0为方向盘零位偏移,κp为调节动态性能的增益系数,ν为车辆纵向速度。
预瞄跟随法考虑到了道路的几何特性,这种几何特性的输入一般称之为前馈,它当然可以用PID来控制误差,一般是控制横向误差。预瞄控制法依赖预瞄点的选择,大部分时候预瞄距离是个固定的经验值,也有少数自适应预瞄距离的研究,这就限制了其灵活性,小半径和低速下表现良好,高速和大弯道下还需要进一步研究增强。
最后是基于车辆动力学详细模型的。横向控制研究最初是由美国通用汽车公司和美国无线电公司在 20 世纪 50 年代末合作开展的,通用是在此领域研究最深入的厂家。
我们来看通用汽车在无人车横向控制领域的一项专利,这项专利是一种为沿车行道行进的自动驾驶或半自动驾驶车辆提供横向转向控制的方法。在自动驾驶或半自动驾驶车辆中车道居中、车道保持、车道变换、碰撞紧急转向等都需要车辆自主的横向控制。这种方法是建立一个车辆动力学模型,车辆动力学数学模型包括状态变量、转向控制变量和前方道路扰动系数,所述前方道路扰动系数定义所述车行道的曲率、倾斜度和坡度;使用所述转向控制变量确定缩小当前车辆路径和期望车辆路径之间的差异的转向控制目标;使用所述数学模型确定最优转向控制信号,所述控制信号提供所述转向控制目标且包括反馈部分和前馈部分,其中所述前馈部分包括所述道路扰动系数;以及将所述控制信号提供给转向控制器。
简单地说就是依据高正确度(或者高精确度)地图提供的道路曲率、倾斜度和坡度,得出一个体感舒适的转向控制角度和转向控制角速度。这种方法是最低成本的高速公路型无人驾驶,在现有的L2级系统上基本不增加硬件即可实现。当然,车道线级定位还是难点。
上图中,16代表无人车的控制模块,20为地图数据库,22为导航系统,24为GPS单元,28为车辆动力学模型。26为传感器,检测车道线与车道标识。30为车辆横向控制器,32为车辆横向执行器即EPS,电动助力转向。
上图为单轨自行车模型,52与54是车轮,58为车辆重心,56为道路边界。
其中△y为车辆重心与车道的横向偏移量(车道偏移量),△Ψ为相对于车道的偏移角度。单轨经典自行车模型如下
Vy为车辆横向速度,r为车辆横摆角速度,Vx为车辆纵向速度,Cf和Cr分别为前后桥的侧偏刚度,a为车辆重心至车辆前桥的距离,b为车辆重心至车辆后桥的距离, M为车辆的质量,Iz为车辆12的惯性横摆力矩,x为路径曲率,为前车轮角度。
当然要不嫌麻烦的话还有4自由度、6自由度甚至17自由度模型。
定义X为角度状态变量。对无法深入车辆底层的厂家来说,X就是EPS角度接口,对传统车厂则下沉一层到EPS的扭矩接口。如果是角度接口,那么
,如果是扭矩接口,那么。状态变量X的导数就是
。U为转向控制变量,如果是角度接口,那么U就是前轮转向角度、差动制动(可能没有)、后轮转向角度。对于扭矩接口,则为前轮扭矩、横摆力矩和后轮转向角度,h为道路扰动系数。对于角度接口,,对于扭矩接口,。其中k为道路曲率,γ为路面倾斜度以及β为路面坡度。 控制矩阵A为
矩阵B为
。其中,,,,,。对于后轮可转向的车辆,B就是两列,卡迪拉克的CT6就具备后轮转向功能。
得到数学模型化后,下一步就是用最小二次代价函数法求得函数J的控制变量U,以此最小化期望路径与实际路径之间的误差。车辆的在任何时刻k的规划路径(或参考轨迹)是一组点rk+j,j = 1, 2,......,p。每个点rk+j都是二维向量,其包括车辆重心的车道横向位置,且相对于车辆航向角A Ψ。设置点的数量由预测时域Tp = pTs,其中Ts是采样时间。数学模型的未来输出应遵循参考轨迹rk+j 。于采样时间k的状态变量Xk是已知的,求得s最优转向控制变量Uk的问题缩小至求得控制变量Uk中的二次函数J的全局最小值。这一问题可用标准的二次规划求解。
车辆跟随的行驶车道的弯道62,其中采样点66为车辆的当前位置,道路当前的曲率、倾斜度和坡度的扰动系数h(t),其中t为时间。在车辆沿弯道62的未来位置的采样点64的道路曲率、倾斜度和坡度定义为h (t+τ),h (t+2 τ),……,h (t+ητ),其中τ为时间变化。针对新的扰动系数h1,状态和控制变量X和U在线条68 示出的每个采样点64都转换为Xi和Ui。然后,采用MPC或LQ控制算法,其使用带新的状态和控制变量X1和U1的方程。
在卡迪拉克超级巡航中,纵向控制无需考虑,跟随前车速度即可,这就大大简化了系统。这种系统以对地图的依赖降低甚至消除了对车道线的依赖,看似L2+,实际比L3来得更先进,尤其是在中国更实用(中国塞车时经常出现不按车道线行驶,车道线经常被车辆遮盖,依赖车道线的塞车自动跟随相当难做)。这种系统再加上纵向控制算法和紧急转向算法,即可不增加硬件成本或少增加硬件成本情况下达到高速公路的无人驾驶,其价格完全能够为普通消费者接受。
传统车厂两条腿走路,一条是高速公路型的L4,注重成本,强调舒适性,目标客户是经常上高速的消费者,一条是城区低速型L4,面向网约车或共享出行市场。而初创企业往往只能做城区低速型L4。
2018年2月5日,现代汽车自动驾驶测试车队以100km/h-110km/h的速度从韩国首尔行驶到平昌,在高速公路上成功地展示了Level 4级自动驾驶技术,行程总计188公里。完成此次测试的车队是由3辆现代燃料电池车Nexo和2辆Genesis G80组成,这些车辆都搭载了Level 4级自动驾驶系统和5G网络技术。
上图为NEXO的传感器布局, 前后激光雷达为法雷奥或IBEO的Scala,现代并未把距离标的很远,这款激光雷达已经由法雷奥量产。两侧激光雷达为IBEO的LUX。前毫米波雷达还是比较老的德尔福ESR2.5。两个侧后雷达可能是HELLA的24GHz毫米波雷达。一个双目摄像头,FOV为45度,有效距离达90米,可能使用了索尼的IMX390CQV传感器,像素达245万。一个单目摄像头。



 广告
广告 编辑推荐




最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
