




 广告
广告





















































智能汽车测试技术:环境感知系统的测试技术与方法(四、案例一:基于封闭场地环境的感知系统测试)

智能汽车是汽车、电子、信息通信、道路交通运输等行业深度融合的新型产业形态。当前, 我国智能汽车产业进入快车道, 技术创新日益活跃, 新型应用蓬勃发展, 产业规模不断扩大,而相应的测试技术体系也在不断完善, 推动产业进步。本书首先立足于整体现状对智能汽车测试体系架构进行综述, 并针对测试技术的发展趋势和整个核心技术进行详细描述;然后, 针对测试体系中每一测试过程的概念、核心思想、关键技术、测试方法、发展趋势等进行详细描述。
本书可供智能汽车设计人员及测试人员阅读使用, 也可供车辆工程专业及相关专业师生阅读参考。
本文是《智能汽车测试技术》系列文章第四篇,上两篇:
智能汽车测试技术:环境感知系统的测试技术与方法(三、数据生成模型介绍)
智能汽车测试技术:环境感知系统的测试技术与方法(二、测试技术框架及各类感知环境介绍)
智能汽车测试技术:环境感知系统的测试技术与方法(一、需求分析及系统介绍)
注:本文节选自《智能汽车测试技术》,由机械工业出版社于2025年6月份出版
《智能汽车测试技术》目录
第1 章
导论
1.1 背景与需求/ 001
1.2 基本概念/ 003
1.2.1 测试与评价的基本概念/ 003
1.2.2 产品全生命周期中的测评技术/ 004
1.3 现状与挑战/ 005
1.4 本书章节安排/ 006
第2 章
智能汽车
测评概述
2.1 测评需求分析/ 009
2.1.1 安全性测试与验证/ 009
2.1.2 智能性测试与评价/ 012
2.2 测试方法论/ 015
2.2.1 安全性测试验证框架/ 015
2.2.2 智能性测试评估框架和体系/ 017
2.3 测试工具链及应用要求/ 023
2.3.1 测试工具链/ 023
2.3.2 测试需求与测试工具的适配性/ 027
2.4 本章小结/ 029
参考文献/ 030
第3 章
智能汽车
测试场景
3.1 场景基本概念/ 031
3.2 场景体系/ 033
3.2.1 场景要素与属性/ 033
3.2.2 场景层级/ 035
3.2.3 场景分类/ 036
3.3 场景生成方法/ 037
3.3.1 基于形式化描述的场景生成方法/ 037
3.3.2 基于驾驶员模型的场景生成方法/ 040
3.3.3 安全关键场景生成方法/ 048
3.4 场景采集与利用/ 051
3.4.1 场景采集技术/ 051
3.4.2 场景库搭建/ 052
3.5 本章小结/ 052
参考文献/ 053
第4 章
环境感知
系统的测试
技术与方法
4.1 环境感知系统测试需求分析/ 055
4.2 环境感知系统介绍/ 057
4.2.1 感知系统/ 057
4.2.2 硬件模组/ 058
4.2.3 认知算法/ 058
4.3 环境感知系统测试技术框架/ 059
4.4 各类感知环境介绍/ 060
4.4.1 封闭场地环境/ 060
4.4.2 道路交通环境/ 064
4.4.3 虚拟仿真环境/ 066
4.5 数据生成模型介绍/ 069
4.5.1 降雨图像生成方法概述/ 070
4.5.2 降雨图像生成模型介绍/ 071
4.5.3 降雨图像生成模型结果/ 075
4.6 具体测试案例/ 076
4.6.1 案例一:基于封闭场地环境的感知系统测试/ 076
4.6.2 案例二:基于虚拟仿真环境的硬件模组测试/ 078
4.6.3 案例三:基于虚拟仿真环境的感知系统测试/ 081
4.6.4 案例四:基于三类感知环境和数据生成模型的
认知算法测试/ 083
4.7 本章小结/ 086
参考文献/ 087
第5 章
决策规划
系统的测试
技术与方法
5.1 决策规划系统的测试需求与挑战/ 089
5.1.1 测试需求/ 089
5.1.2 测试挑战/ 090
5.2 基于场景的测试技术与方法/ 092
5.2.1 静态试验设计测试方法/ 092
5.2.2 动态试验设计测试方法/ 094
5.3 基于真实里程的测试技术与方法/ 101
5.3.1 开放道路测试技术/ 101
5.3.2 重要度采样加速测试方法/ 103
5.4 基于虚拟里程的测试技术与方法/ 104
5.4.1 虚拟里程测试系统组成框架/ 105
5.4.2 用于虚拟里程测试的NPC 模型生成方法/ 106
5.4.3 用于虚拟里程测试的NPC 模型性能验证/ 113
5.4.4 虚拟里程测试的应用/ 118
5.4.5 小结/ 130
5.5 其他测试技术/ 131
5.5.1 自动化测试技术/ 131
5.5.2 错误注入测试技术/ 139
5.5.3 分布式自动化测试技术/ 152
5.6 本章小结/ 157
参考文献/ 157
第6 章
整车测试
技术与方法
6.1 整车测评需求分析/ 159
6.2 封闭测试场地平台/ 160
6.2.1 封闭测试场/ 160
6.2.2 动态模拟目标物系统/ 162
6.2.3 定位与数据采集系统/ 163
6.3 开放道路测试系统/ 164
6.3.1 测试方案制定/ 165
6.3.2 数据采集与数据闭环系统/ 165
6.4 本章小结/ 166
第7 章
智能汽车
安全性评估
7.1 基于具体场景的安全性评估/ 169
7.1.1 场景瞬时风险评估方法/ 170
7.1.2 多阶段安全评估/ 180
7.1.3 单个测试场景结果外推/ 181
7.2 基于逻辑场景的安全性评估/ 182
7.2.1 评估要求/ 182
7.2.2 面向逻辑场景评价的危险域识别方法/ 183
7.3 针对被测功能的安全性评估/ 192
7.4 本章小结/ 192
参考文献/ 193
第8 章
智能汽车
综合行驶
性能评估
8.1 测评需求与研究现状/ 195
8.1.1 测评需求/ 195
8.1.2 研究现状/ 195
8.2 测评基本流程/ 197
8.3 典型测试场景矩阵/ 198
8.4 测试方法与流程/ 199
8.4.1 测试方案/ 199
8.4.2 背景车跟驰模型/ 199
8.4.3 测试数据输出/ 201
8.5 评价方法与流程/ 202
8.5.1 评价体系/ 202
8.5.2 评价流程/ 204
8.6 测评示例/ 206
8.7 本章小结/ 209
参考文献/ 209
附 录
附录A 测试工况参数设置/ 210
附录B 背景车跟驰模型/ 212
附录C 归一化方法/ 214
附录D 常见缩写词/ 216
4. 6 具体测试案例
本节将有四个案例, 举例说明4.3 节测试技术框架的应用。
4.6.1 案例一:基于封闭场地环境的感知系统测试
本案例的测试技术框架对应图4 - 27 中序号②的连线。封闭测试场地具备雨雾模拟设备, 可以模拟各类天气, 同时为测试提供拟真的道路条件, 感知系统直接在该封闭场地环境中被测试, 输出相对应的认知结果。被测对象为某公司融合感知系统(由1 个前视摄像头、1 个前向毫米波雷达和4 个角雷达构成), 测试该感知系统的性能。测试流程如下。
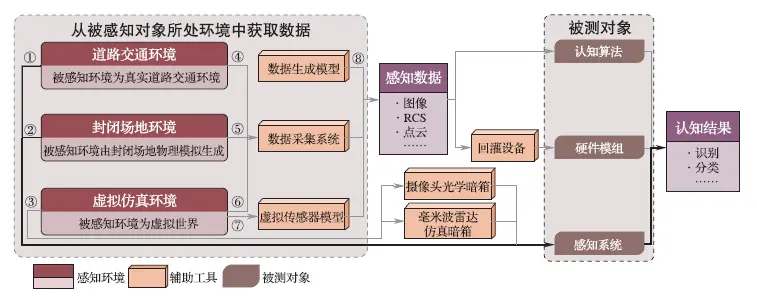
图4 -27 基于封闭场地环境的感知系统测试技术框架
(1) 搭建测试场景
基础场景如图4 -28 所示。道路为长直道, 前车行驶在车道中心, 自车以相同的车速行驶在其后方。当两车到达预设的纵向间距时, 前车开始制动减速直至停车。
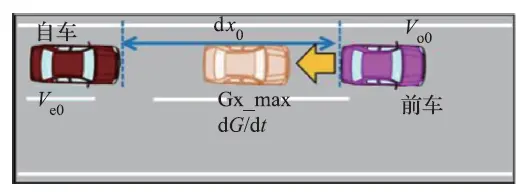
图4 -28 前车制动场景示意图
(2)构建测试用例
结合试验场地及测试车辆实际情况,针对机动车辆感知系统测试项设计并构建各类触发条件,表4-1所列为本次测试中的两个触发条件。在基础场景上叠加上述包含机动车辆测试项的若干感知系统触发条件,即完成若干测试用例的构建。
表4-1 本次测试中的两个触发条件

(3) 输出测试结果
每个测试用例重复测试至少三次。下面以T1 传感器遮挡和T2 小雨天气为例, 介绍该测试实例的试验结果。
1)T1:传感器遮挡。试验过程中测试车辆由测试人员控制,测试过程实拍图如图4-29所示。
在T1触发条件下,测试车辆的感知系统表现仍保持稳定,未出现漏检现象。但是目标状态检测结果相较于基准条件下偏差增大,说明该触发条件会显著增加感知系统的感知状态不确定性。其中某次感知结果如图4-30所示。

图4 -29 金属覆盖毫米波雷达表面
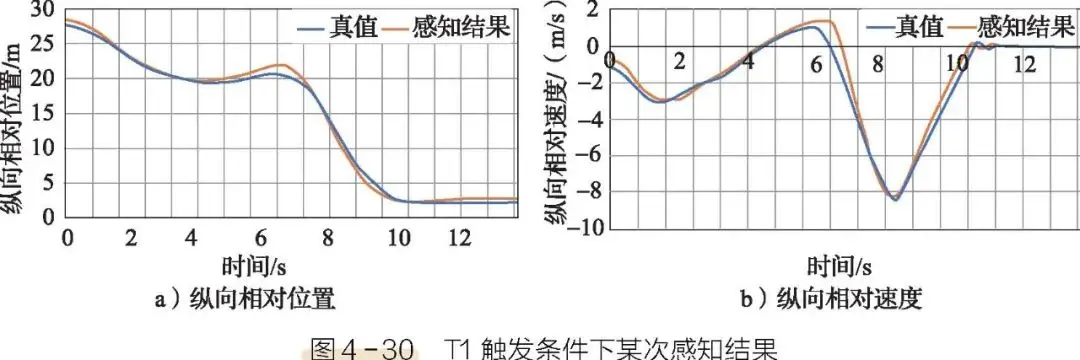
图4 -30 T1 触发条件下某次感知结果
2)T2:小雨天气。试验过程中测试车辆由测试人员控制,测试过程实拍图如图4-31所示。在T2触发条件下,感知系统表现出的性能良好,未出现漏检现象。目标状态检测结果与基准条件下的偏差较小。其中某次感知结果如图4-32所示。

图4 -31 场地模拟小雨
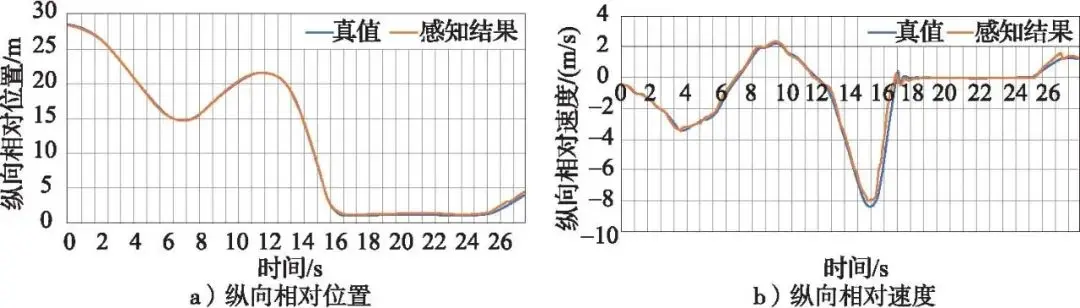
图4-32 T2触发条件下某次感知结果
本书首先立足于整体现状对智能汽车测试体系架构进行综述, 并针对测试技术的发展趋势和整个核心技术进行详细描述;然后, 针对测试体系中每一测试过程的概念、核心思想、关键技术、测试方法、发展趋势等进行详细描述。
本书可供智能汽车设计人员及测试人员阅读使用, 也可供车辆工程专业及相关专业师生阅读参考。
作者简介:
陈君毅,2009年毕业于同济大学汽车学院,获工学博士学位,任职于同济大学汽车学院。长期从事自动驾驶汽车测试与评价方向研究工作,先后主持和参与国家级、省部级项目共11项,并与华为、路特斯、上汽大众、蔚来等企业开展了深度校企合作研究。近5年,在国内外学术期刊和国际会议上共发表SCI/EI检索论文近30篇,其中以第一作者或及通讯作者发表的为20余篇;申请发明专利30余项(已授权7项)。担任SAE汽车安全和网络安全技术委员会秘书、功能安全和预期功能安全分委会主席;是自动驾驶测试场景国际标准(ISO3450X)支撑专家组成员,以及CAICV联盟预期功能安全工作组核心成员;担任《汽车工程》和《汽车工程学报》青年编委委员,IEEE Transactions on Intelligent Vehicles、Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering、《中国公路学报》、《汽车工程》、IEEE Intelligent Transportation Systems Conference、IEEE Intelligent Vehicles Symposium等国内外期刊和国际会议审稿人,曾于多项国际学术会议担任分论坛主席。
版权信息:
智能汽车测试技术 / 陈君毅等著. -- 北京 : 机械工业出版社, 2025. 5. -- (智能汽车关键技术丛书).ISBN 978-7-111-77871-4 Ⅰ. U467 中国国家版本馆CIP数据核字第2025X8D229号
本书由机械工业出版社出版,本文经出版方授权发布。



 广告
广告 编辑推荐




最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
