




 广告
广告





















































电子电气架构---基于区域架构的软件定义汽车
2025-05-27 09:36:32· 来源:车载诊断技术

本文将讨论具有区域架构的软件定义车辆如何推动开发更智能、更安全、更节能的车辆。通过集中管理软件并将硬件与软件分离, 这种车辆可以更轻松地进行更新、降低成本并提供新功能
汽车原始设备制造商 (OEM) 持续致力于改善乘员体验、简化无线更新、降低设计和制造成本、收集更多车辆数据并创造新的收入来源。然而, 当今基于域的车辆架构无法轻松有效地满足这些需求, 这也促使制造商转向软件定义车辆和区域架构。通过集中管理软件并将硬件与软件分离,软件定义车辆成为实现更智能、更安全和更节能车辆过程中的下一阶段目标。
一、基于域的车辆和软件定义车辆
当前,基于域的架构在扩展软件功能方面显得力不从心,而汽车制造商却能够借助无线更新技术,轻松实现软件的维护与升级。域架构将车辆功能的控制精细划分为诸如车载信息娱乐系统、高级驾驶辅助系统(ADAS)等多个独立域,具体架构可参见图。
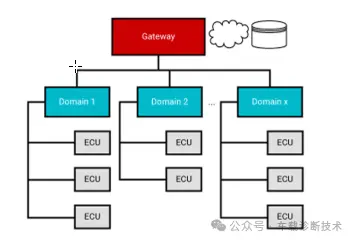
如图展示了车辆基于域的架构示意图。
然而,当车辆功能需要跨越多个域进行协同通信与控制时,这种细分化的架构无疑会增加软件开发的复杂度。软件系统的更新也面临重重挑战,因为这些系统由不同的一级供应商负责设计与制造,且各自采用不同半导体供应商提供的处理器与微控制器。此外,控制车辆功能的软件与硬件之间高度耦合,进一步加剧了升级的难度。汽车制造商需安装电子控制单元(ECU)以执行特定功能,如座椅调节、泊车辅助等,并在每个ECU的微控制器上运行专门的应用固件。由于ECU因车型和配置不同而有所差异,这无疑推高了制造与设计成本。因此,对所有车型、配置以及各个ECU进行统一的软件管理,无疑是一项浩大且复杂的工程,需要汽车制造商与多家一级供应商,甚至半导体供应商紧密合作,方能顺利实施新的软件更新。
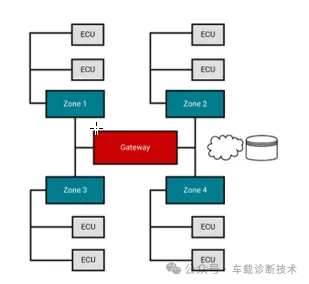
相比之下,采用区域架构的软件定义车辆,通过集中化软件管理,极大地简化了无线更新的流程。该架构通过将车辆硬件与高层应用软件解耦,赋予了软件添加新功能的灵活性,并在不同车型与配置之间实现了更具成本效益的可扩展性。
在软件定义车辆(SDV)领域,集中式软件架构展现出显著优势,其核心亮点在于大幅削减了承载应用软件的电子控制单元(ECU)数量,并简化了无线更新流程——通过减少需更新固件的处理器与微控制器种类,让软件迭代变得更为高效。当需要增添新功能或应用程序时,仅需对中央计算机或区域控制模块的软件进行升级即可,因为下游负责机械驱动(如前照灯、车门模块、音频放大器)以及处于车辆网络边缘的传感器等ECU,已从具体应用软件中剥离抽象,仅需执行基础控制指令。如此一来,执行机械驱动的ECU以及边缘传感器的固件设计得以简化,未来甚至有望将实时控制任务全面迁移至中央计算机处理。
不仅如此,集中式软件架构还赋予了车辆硬件更强的复用性与功能拓展性。原本专为特定应用设计的传感器与执行器,如今可被灵活调配,承担起全新的任务角色,进而衍生出多样化的创新功能。以车内雷达传感器为例,它最初或许仅用于乘员状态监测,但在软件定义车辆架构下,通过算法升级与软件适配,便能额外承担起入侵预警、盗窃检测以及安全带未系提醒等附加功能。这意味着,汽车制造商能够更高效地挖掘车辆既有硬件与传感器的潜力,以软件创新驱动功能升级,实现“一物多用”。
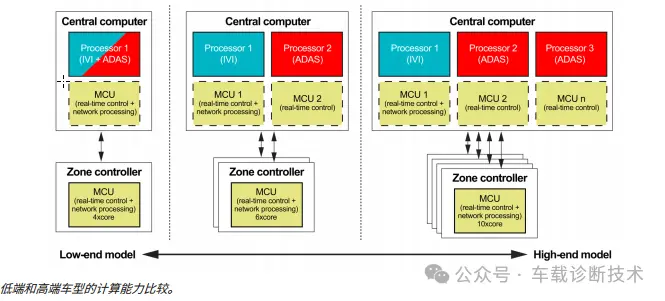
更为关键的是,集中式软件架构实现了软件功能的跨平台扩展(如图所示),极大降低了开发成本。经济型车辆与豪华品牌车型可共享同一套软件基础架构,仅通过差异化配置,便能实现诸如遥控免钥匙进入、车窗智能升降、后视摄像头集成等基础功能。豪华车型则可在这些共性功能之上,通过软件升级叠加高级驾驶辅助、智能座舱体验等增值服务。尽管在追求极致性能时,部分硬件升级仍不可避免,但整体架构的模块化设计,使得车辆计算能力的提升或缩减变得灵活可控——通过增减处理器与微控制器的数量,即可灵活调整中央计算机或区域控制模块的计算性能,确保软件与硬件的协同进化。
在车辆中集成诸如座椅按摩、方向盘加热以及道路噪声消除等高级功能,往往需要额外安装相应的硬件组件。然而,通过集中式软件架构的革新,我们仅需对中央计算机或区域控制模块进行软件层面的更新,便能实现对这些附加功能的精准控制。值得一提的是,新兴的无微控制器(MCU)技术正逐步简化甚至有望彻底消除ECU中传统上用于管理传感与机械驱动的软件冗余。例如,采用串行外设接口(SPI)的温度传感器,如今能够直接与启用了SPI通信的无微控制器物理层无缝对接。在此情境下,无微控制器的物理层接替了MCU的角色,并内置了集成CAN或以太网收发器,从而省去了传统上将SPI信号转换为CAN信号所需的MCU,以及与传感器通信时不可或缺的专用软件。
为支撑软件定义车辆(SDV)的灵活性与可扩展性,硬件抽象层的设计显得尤为重要。这一层通过构建标准化的应用程序编程接口(API),实现了车辆硬件与软件之间的有效解耦,为应用程序源代码在多个分布式ECU中的重用铺平了道路。其中,微控制器抽象层(MCAL)作为底层硬件与上层软件交互的桥梁,发挥着至关重要的作用。MCAL提供的API能够抽象化底层硬件外设的复杂性,使得应用软件能够跨越不同硬件平台,与硬件进行高效交互,而无需深陷于特定硬件的细节之中。这种抽象化设计对于提升软件在不同车辆平台间的可移植性至关重要,它允许汽车制造商(OEM)在多个车型和变体之间轻松复用软件组件,仅需进行细微的调整即可满足不同需求。
进一步地,ECU抽象层(ECUAL)作为高级软件与MCAL之间的接口,通过标准化API为所有可用的ECU硬件(包括MCU及各类外设器件,如CAN收发器、以太网PHY以及串行器/解串器设备等)提供了统一的访问途径。这一设计不仅简化了硬件与软件的集成过程,还增强了系统的灵活性与可扩展性,为软件定义车辆的未来发展奠定了坚实的基础。
二、软件定义车辆支持的新技术
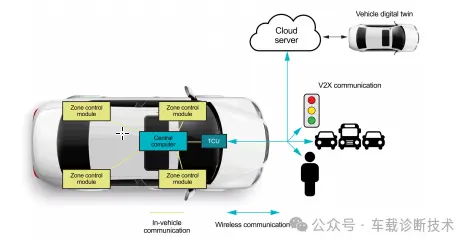
软件定义车辆(SDV)技术为汽车制造商(OEM)开辟了全新的技术疆域与收入增长点。随着车辆中电子器件与传感器的日益集成,车辆性能数据、故障场景记录以及驾驶员偏好信息变得前所未有的易于获取。软件定义车辆架构不仅简化了车辆数据的收集流程,还强化了数据的安全共享能力(详见图4),为数字孪生技术与车联网(V2X)功能的深化发展提供了有力支撑。
借助数字孪生技术,即现实世界的虚拟镜像,软件定义车辆能够将关键数据上传至云端,用以精准记录车辆在实际运行中的性能表现。这些数据涵盖电动汽车电池随时间衰减的健康状态、不同行驶条件下高级驾驶辅助系统(ADAS)传感器的实时反馈,乃至车辆各项功能的使用频率等。通过对这些数据的深度分析,OEM能够精准优化车辆功能,显著缩短应对新挑战(尤其是在ADAS与自动驾驶技术领域)的响应时间。此外,该技术还能助力OEM提前识别特定车型的共性问题,并在问题升级为重大故障前,及时提供修复方案。
除了数字孪生技术的赋能,车辆数据在V2X通信中也扮演着举足轻重的角色。V2X通信通过实现车辆、行人及基础设施间的信息互联互通,有效提升了道路安全与交通效率。例如,将车道偏离预警与车速信息等关键数据从中央计算系统安全传输至周边车辆,能够显著增强防撞能力,降低交通事故风险。
在探索新的收入来源方面,OEM正积极寻求突破。软件定义车辆赋予了OEM对车辆内部软件的全面控制权,从而能够打造出独一无二的用户体验。针对可通过软件激活的特定功能,OEM可灵活推出订阅服务模式。这些功能既可以是简单易用的座椅加热,也可以是复杂先进的高级驾驶安全功能。尽管订阅模式可能对部分消费者吸引力有限,但其核心价值在于,新功能能够通过软件更新无缝融入现有车辆,无需消费者购买新车,既经济又环保。
在无线软件更新流程方面,OEM需精心开发、测试无线(OTA)或固件无线升级(FOTA)软件更新,并将其上传至安全可靠的云端服务器,供车辆访问下载。车辆则需具备下载并存储更新的能力,无论是存储在中央计算系统、区域控制器还是边缘ECU中。鉴于更新生效通常需要ECU重启,因此更新过程必须在车辆处于安全状态时进行。
在实施更新时,一种可行做法是通知驾驶员有可用更新,并引导其在安全停车后确认启动更新。或者,系统也可通过跟踪车辆使用时间,智能预估无需用户干预即可执行软件更新的最佳时段。在此期间,车辆可能暂时无法启动,因此更新过程必须高效完成,以最大限度减少对用户的影响。在整个更新过程中,ECU需保持持续供电,并需充分考虑车辆的蓄电池容量,以确保更新顺利进行。为降低风险,ECU可设计为同时存储当前软件版本与更新版本,以便在下次启动时灵活切换至更新版本。若更新失败,系统可自动回滚至之前的软件版本,确保车辆始终保持正常运行状态。
当车辆功能分散于多个ECU时,更新程序的规划与协调显得尤为重要。这包括为所有受影响的ECU部署更新包,并确保全系统的兼容性与性能不受影响。通过精心设计的更新流程,OEM能够确保软件更新既安全又高效,为软件定义车辆的持续发展奠定坚实基础。
三、软件定义车辆和区域架构方法的差异
在汽车行业向软件定义车辆(SDV)转型的浪潮中,每家汽车制造商均采取了独具特色的实施路径。面对上一代车辆平台遗留的技术与架构限制,众多汽车制造商正逐步向更契合集中式软件策略的电气与电子区域架构迁移。
如图所示,尽管多数汽车制造商均在积极研发区域架构,但在决定车辆功能控制软件的具体部署位置时,却呈现出多样化的策略选择。集中软件控制主要存在三种方案:一是将所有软件集中于中央计算机;二是在中央计算机与区域控制模块之间实现软件功能的合理分配;三是将软件分散部署于多个域控制器与区域控制模块之中。部分汽车制造商倾向于将高性能计算任务(如高级驾驶辅助系统ADAS与车载信息娱乐系统)集中处理,同时为其他功能域增设额外的应用处理能力。在ADAS与车载信息娱乐系统域之外,实时控制功能则通常在区域控制模块或边缘ECU中得以实现。
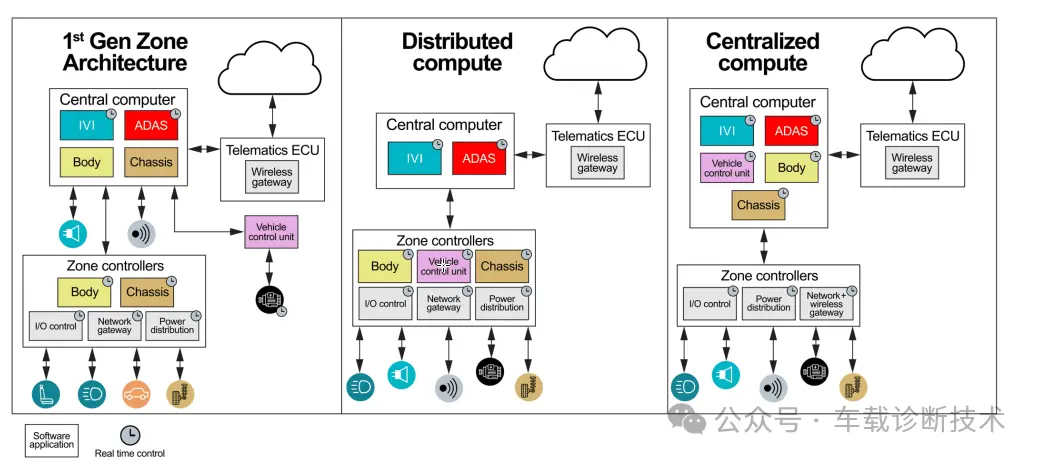
从汽车制造商的视角出发,集中计算方法无疑具有显著吸引力,因为它能够实现单台计算机对车辆所有功能的全面控制。然而,这一方案也面临着通信链路故障可能引发的实时控制环路延迟(如主动悬架、车窗防夹功能)以及功能安全等方面的挑战。
与此同时,分布式计算方法正逐步向集中式软件架构靠拢,部分应用程序与实时控制软件被保留在区域控制模块中,甚至在独立的域控制器中运行。值得注意的是,即便是在同一车辆内部,不同汽车制造商对区域控制模块的要求也各不相同。一个区域可能负责处理车身实时控制、暖通空调以及底盘功能,而另一个区域则可能专注于额外的车身、照明以及车辆控制单元应用软件。最终,汽车制造商必须在硬件与机械驱动控制延迟、车载网络功能、功能安全、信息安全以及如何根据所选架构及其特定区域控制模块要求来构建软件之间找到平衡点,以确保软件定义车辆的高效、安全与可靠运行。
结语
软件定义车辆(SDV)正以前所未有的态势,为汽车制造商开辟出一片充满无限可能的新天地。这一创新理念不仅显著缩短了新车与新功能的开发周期,大幅降低了研发成本,更在车辆的全生命周期内,持续为驾驶者带来焕然一新的体验,同时为汽车制造商开辟了全新的收入增长点。
尽管在实现软件定义车辆的道路上,汽车制造商拥有多样化的策略选择,但集中管理车辆软件、实现硬件与软件的深度解耦,无疑是推动这一变革的核心要义。通过构建区域架构,并深度融合软件定义车辆的理念,汽车制造商能够加速推进智能化、安全化、节能化车辆的研发进程,为消费者打造更加卓越、更加贴心的出行解决方案。
展望未来,软件定义车辆将持续引领汽车行业的变革潮流,成为推动汽车产业转型升级的重要力量。汽车制造商需紧跟时代步伐,积极探索创新路径,以软件为驱动,不断塑造更加智能、更加安全、更加环保的未来出行新图景。
- 下一篇:一文了解汽车ECU的看门狗
- 上一篇:揭秘L2/组合驾驶辅助中的“第三只眼”



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
