




 广告
广告





















































CAICV联盟发布 | 城市巡航功能预期功能安全测试评价方法研究报告

面向城市巡航功能预期功能安全测试评价问题,由清华大学、中国汽车工程研究院股份有限公司、同济大学、上海机动车检测认证技术研究中心有限公司共同牵头,中汽创智科技有限公司、苏州挚途科技有限公司、中国第一汽车集团有限公司、中汽院智能网联汽车检测中心 (湖南) 有限公司、清华大学苏州汽车研究院、Ansys中国、比亚迪股份有限公司、北京赛目科技股份有限公司、上海测迅汽车科技有限公司等13家单位共同组建了中国智能网联汽车产业创新联盟·预期功能安全工作组·城市巡航功能任务小组。基于专项组2023年开展的一系列研究与实践活动,共同编制了《城市巡航功能预期功能安全测试评价方法研究报告》,如图1、图2所示。

图1 研究报告
图2 研究报告目录
在任务初始阶段,SOTIF工作组城市巡航功能小组对该领域进行了详尽研究,并制定了基于场景的SOTIF开发与测试评价的研究方向。结合现有国内外标准和最佳实践,提出了更易于实施和操作的城市巡航(主要针对城市十字路口道路)系统SOTIF开发及测试评价流程。具体分为典型危害分析与风险辨识、典型场景选取、数据采集/收集/标注、量化评价体系研究、测试规程五部分内容。
1 典型危害分析与风险辨识
本部分概述了城市巡航功能的可操作设计域(ODD),并明确定义了适用于本报告方法的十字路口场景。在建立城市巡航功能系统架构的过程中,城市巡航功能任务小组明确了SOTIF典型危害分析和风险辨识的对象,并确定了功能需求。通过充分利用SOTIF STPA、HARA等分析方法,成功识别了预期功能安全相关危害事件和性能局限等,并详细明确了触发条件。
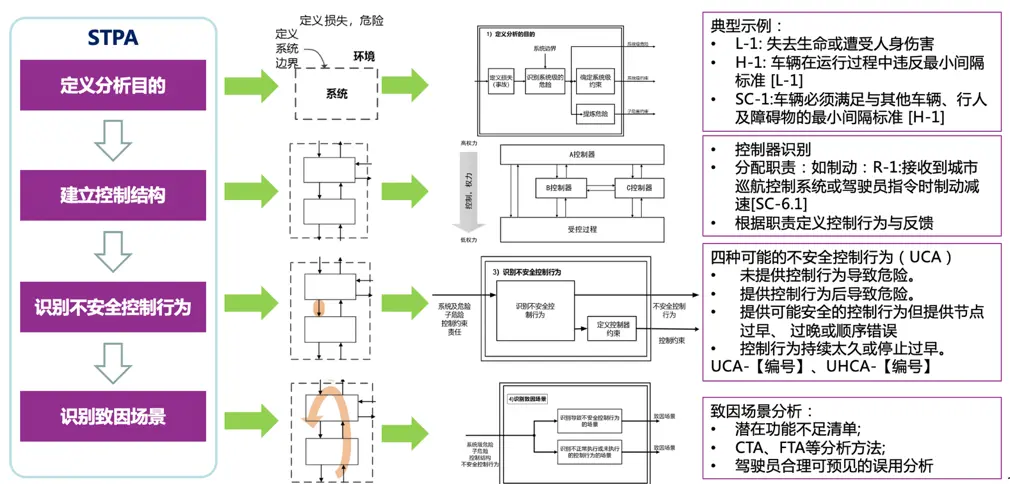
图3 STPA分析流程图

图4 HARA分析的控制架构
2 典型场景选取
根据不同触发条件总结出26个危险场景,并对十字路口事故进行了综合概括,得出了9种主要冲突形式。通过深入分析这些冲突形式导致事故的本质原因,最终形成了10个详细的典型场景,其中包括1个自车直行场景和9个自车左转场景。在这些典型场景中,涵盖了各种交通参与者,如汽车、行人、电动自行车和摩托车。
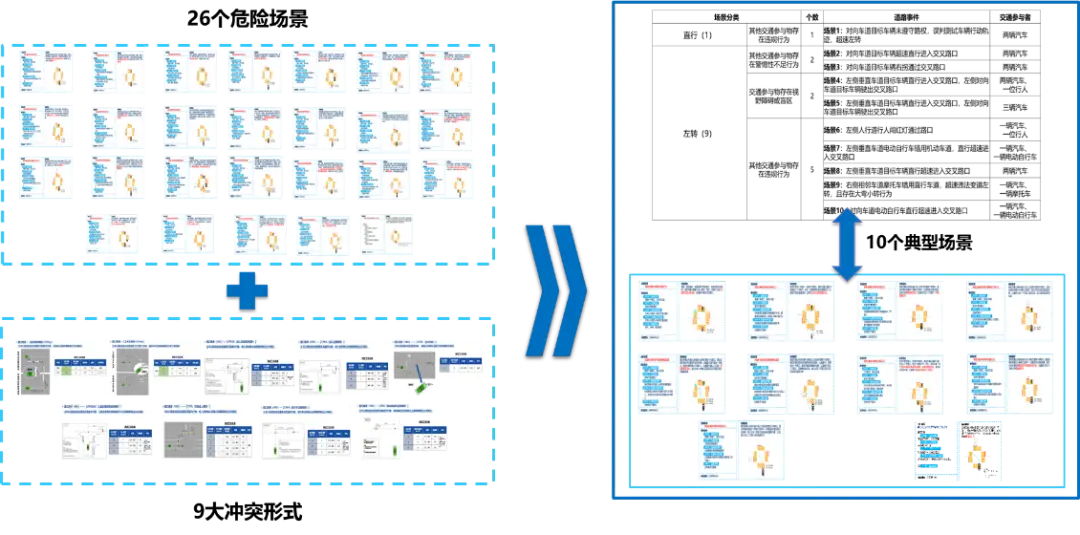
图5 典型场景总结
3 数据采集/收集/标注
城市巡航功能的测试验证需要包括能够反映SOTIF问题的测试用例。在支持城市巡航功能预期功能的测试验证方面,场景测试方法发挥着至关重要的作用,而真实交通数据为测试用例生成提供了坚实的基础。为此,城市巡航功能任务小组采用了无人机对天津和重庆的十字路口进行视频采集,详细定义了典型冲突的场景要素,并创建了高质量的数据集。通过从人工选取的相应场景片段中提取相应场景参数实例,以及对参数分布进行拟合,任务小组有效地完成了数据的处理和标注工作。城市巡航功能的测试用例生成提供了真实反映交通场景的支持。

图6 测试用例生成步骤
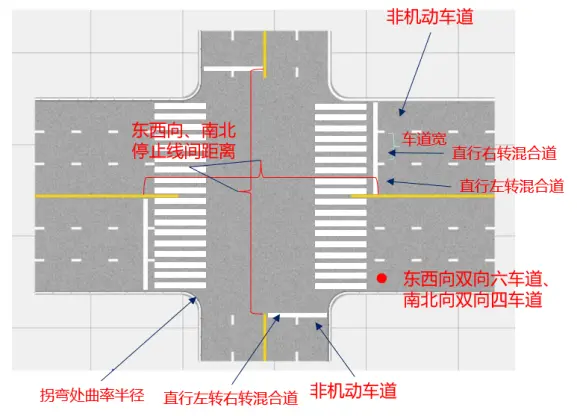
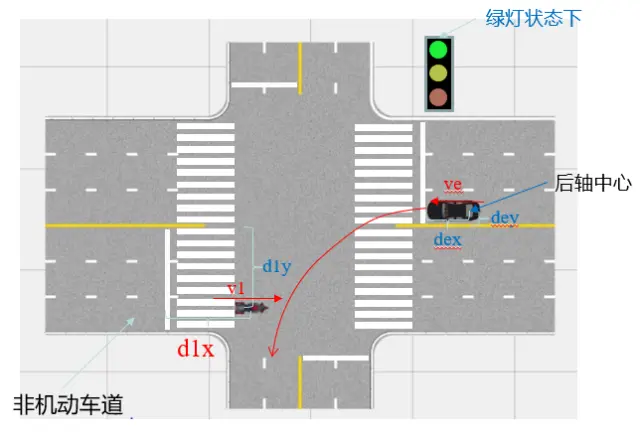
图7 路口结构参数、动态场景要素参数
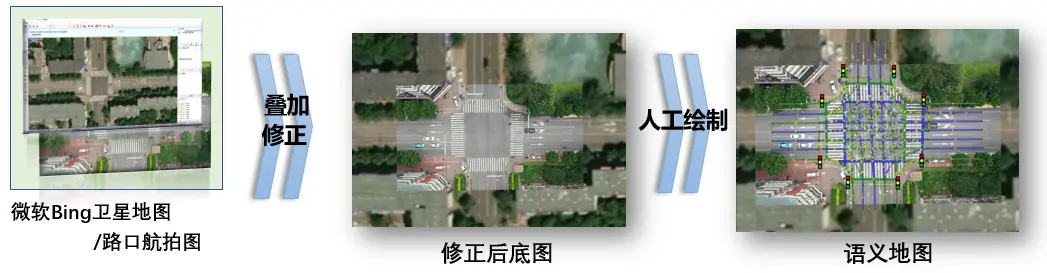
图8 语义地图的绘制
4 量化评价体系研究
在城市巡航的具体工况下,城市巡航功能任务小组针对十字路口工况制定了一个“三阶段-三维度”的评价体系,以涵盖接近路口、路口中、驶离路口这三个关键阶段。该评价体系从安全性、合规性和通行效率这三个维度出发,综合考量车辆城市巡航功能的性能。这种细分和多维度的评价方法旨在全面客观地评估城市巡航功能在不同场景下的表现,为性能的量化评价提供了更为细致和全面的指标。
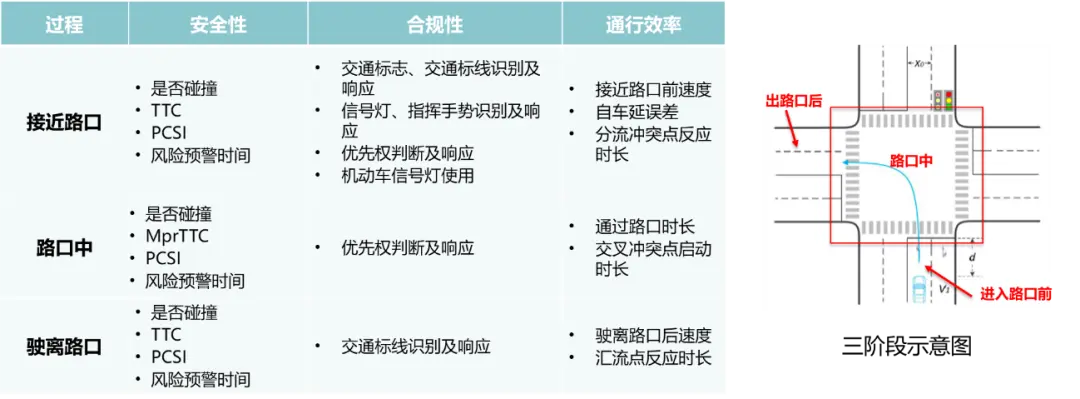
图9 “三阶段-三维度”的评价体系
5 测试规程
城市巡航功能任务小组对虚拟仿真、封闭场地和开放道路三种测试方法进行总结,鉴于预期功能安全所需考虑的复杂交通场景,对试验场景搭建难度、人机共驾风险、数据收集难度、试验成本以及可重复性等多个方面进行了综合考虑,最终选择了虚拟仿真测试方法,以深入验证Autoware系统功能。这一决策是基于对多方面因素的全面权衡,旨在有效应对复杂性,并确保在测试过程中能够满足高标准的可靠性和效率。
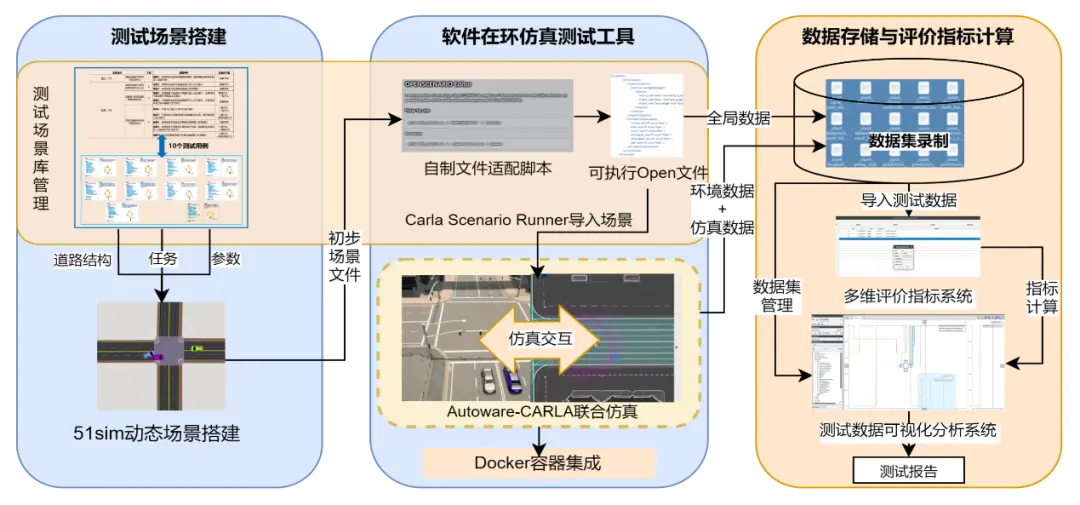
图10 工具链架构图
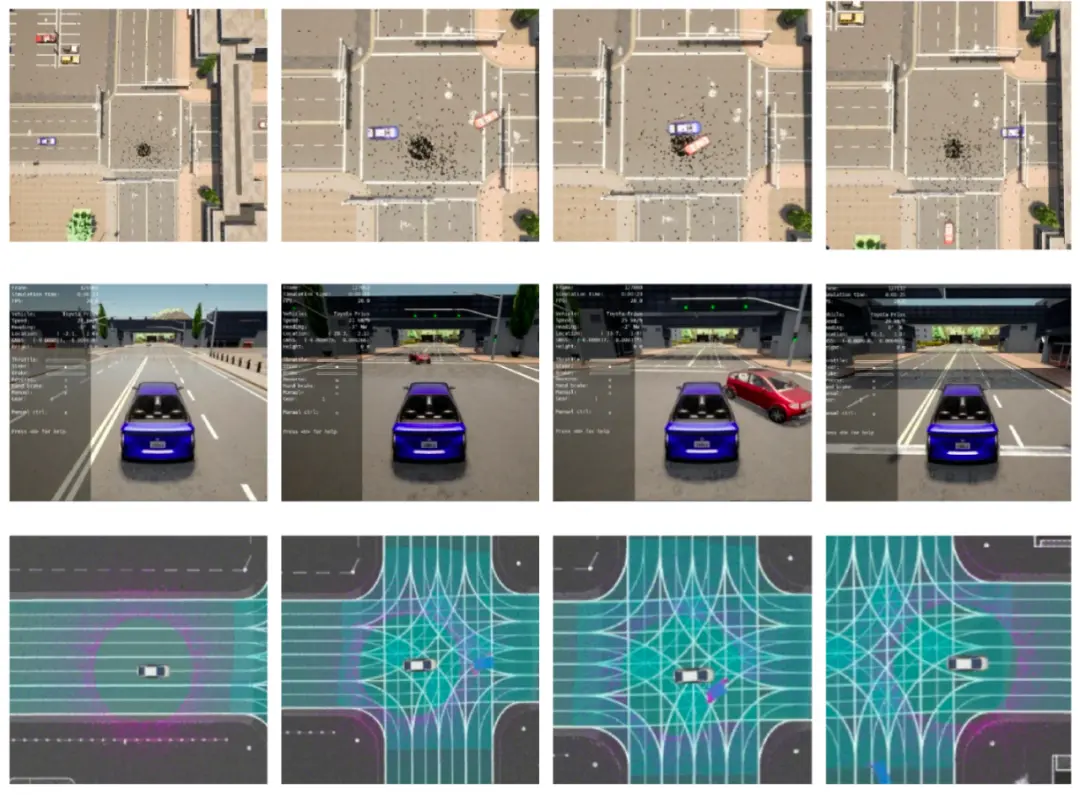
图11 Autoware场景仿真测试
本研究报告仅为研究城市巡航功能预期功能安全问题的探索性开端,完善的城市巡航功能预期功能安全测试评价则需要开展大量的后续工作,例如:十字路口典型危害场景的自动生成、十字路口驾驶员模型的构建、实车测试安全评价标准等等,2024年城市巡航功能任务小组将以以上工作为重点任务进行推进,同时积极推动研究成果标准化工作,敬请关注。
- 下一篇:四部委发文,电动汽车充电将有新变化
- 上一篇:新能源汽车测试之方案篇——驾驶员模拟器



 广告
广告 编辑推荐




最新资讯
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
