




 广告
广告





















































C-V2X车路协同的价值:从智能网联到自动驾驶

近期智能交通领域比较有影响力的事件应该是《深圳经济特区智能网联汽车管理条例》的出台并将于今年8月1日正式实施,该条例中对智能网联汽车的定义是,指可以由自动驾驶系统替代人的操作在道路上安全行驶的汽车,包括有条件自动驾驶、高度自动驾驶和完全自动驾驶三种类型。为什么不直接称为自动驾驶汽车管理条例,笔者猜测其进一步的意思应该是指基于蜂窝车联网(C-V2X)车路协同自动驾驶汽车管理条例,但毕竟这种说法既过于学术化,又读起来拗口,直接用智能网联汽车显得通俗易懂,确实条例在第五章专章对车路协同基础设施的建设进行了规定。如果硬说有不足的话,那么就是条例中对自动驾驶至关重要的时空底座只字未提,只说了通信设施、感知设施、计算设施,没有提及高精度时空底座设施。所以笔者在后面提到的智能网联和自动驾驶都是默认在高精度时空底座支持下的,即动态厘米级的定位。01车联网是智能网联的基础
在数字化背景下,我们说交通运输的趋势是数字化、网联化和智能化,汽车发展的趋势是电动化、网联化、智能化,在移动化的网联汽车应用的场景下,我们很容易直观地想象得到沿着交通线网布设的光纤网络和基站移动接入网络固移结合的一张通信网络,但实际上应该比这个复杂的多,这张网称之为车联网。
从广义上说,车联网包括车内网、车际网和车云网。狭义上说车联网专指车际网,即我们熟知的C-V2X和IEEE 802.11p。
车内网是指汽车内部的通信网络,包括控制局域网(CAN)和车载以太网(Automotive Ethernet);车际网是实现车路、车车通信的通信网络和技术,在无线通信上对通信延时和可靠性有严苛的要求,即高带宽、低延时和高可靠的网络要求;车云网就是车载移动互联网,通过4G/5G移动网络连接到互联网,获取娱乐信息服务和远程信息服务以及OTA(Over-the-Air Technology)汽车软件下载升级等服务。简单示意图如下所示。
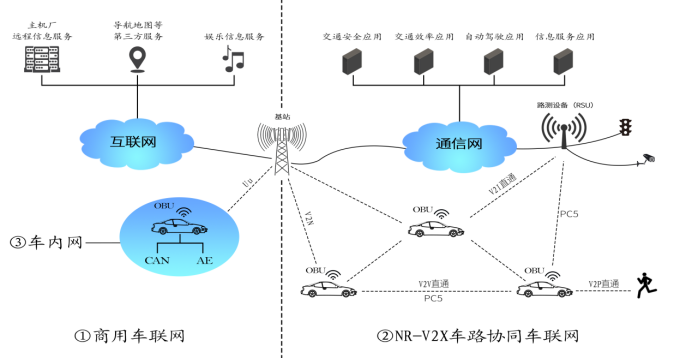
图1、车联网示意图车联网概念的提出是相对于互联网、物联网而言的,互联网以人为中心、物联网以物为中心,显然车联网是以车为中心的,从广义上来说,不同的车联网其侧重点和难易复杂程度是不同的。车载互联网,笔者称之为商用车联网,其主导者是主机厂,通过车载移动终端(目前主流的趋势是大屏和多屏),可以为驾驶员和乘车人提供在线的服务,如车载导航、在线娱乐、车辆在线诊断等远程信息服务,另一个重要的功用是实现软件定义汽车,通过OTA汽车软件升级提升汽车的性能和凸显汽车后端软件和服务的价值,比如说汽车的远程启动功能,在南方夏天提前启动车辆打开冷空调、在北方冬天提前启动车辆打开热空调,是非常好提升体验的场景。因此,由主机厂主导的商用车联网从网络上来说,基于互联网、只要有移动信号覆盖的地方都可以实现在线化的服务,其目的是增加车辆驾乘的体验感、增强用户的粘性,本身是一种市场化行为,因此,在基于商用车联网的智能网联汽车产业发展上,并不需要国家层面出台更多规划进行指导规范,它只是主机厂数字化背景下转型升级竞争的新赛道。在车联网的连接支撑的可以进行信息交互、在线服务的汽车我们就可以称之为网联汽车,那么智能网联汽车则是指汽车智能化和网联化的有机结合,通过搭载先进的车载传感器、控制器、执行器等装置,通过车联网连接技术,实现车路、车车的信息交互,通过大数据人工智能的软件方法,实现环境感知、智能(辅助)决策、协同控制等,从而提高交通路网运行及驾乘的安全和高效。02C-V2X车联网
与商用车联网不同,C-V2X车联网是以车辆信息交互为核心,通过C-V2X网络形成车车(V2V)、车路(V2I)、车人(V2P)、车网(V2N)等之间协同感知、决策与控制,核心包括V2X网络(光纤固网+基站移动网络为主)、路侧单元(RSU)、车载终端(OBU)、云控平台等。
得益于5G网络技术的发展,高带宽、低延时、高可靠车联网得以实现,融合元计算、大数据、人工智能技术后,基于5G网络技术的NR-V2X车路协同的车联网可以重构交通运输的形态和业态,是支撑交通运输行业高质量发展、创新发展和交通强国建设的新动能。
因此,其对传统的车辆架构、交通基础设施构成、车路协同的方式都具有一定的颠覆性,对车而言就是支持由人类驾驶员向系统驾驶员的自动驾驶的持续演进,对交通基础设施而言就是有形的道路基础设施与无形的数字化标志、指示辅助设施的融合、对车路协同的方式由传统的人眼观察向车路信息交互的方式进行演进。
因此,我们今天普遍提及的车路协同,即是指基于C-V2X车联网的车路协同,国家层面出台的智能网联汽车的规划及战略,笔者认为应该是指基于C-V2X车联网车路协同的智能驾驶车辆。2020年国家发改委、工信部、交通部等11部委联合印发的《智能汽车创新发展战略》中指出“智能汽车是指通过搭载先进传感器等装置,运用人工智能等新技术,具有自动驾驶功能,逐步成为智能移动空间和应用终端的新一代汽车。智能汽车通常又称为智能网联汽车、自动驾驶汽车等”。相当于从国家层面明确了我国自动驾驶汽车的技术路线就是基于C-V2X车联网的车路协同方式智能网联汽车,而主要不是单车智能的方式。深圳市智能网联汽车管理条例则更是直接明确为L3级以上的自动驾驶功能的智能网联汽车。基于C-V2X车联网标准由我国学者陈山枝提出,并由3GPP推动 C-V2X标准化工作,面向车联网应用,在R14、R15版本标准基础上,R16支持了 V2V(车与车)和 V2I(车与路边单元)直连通信,通过引入组播和广播等多种通信方式,以及优化感知、调度、重传以及车车间连接质量控制等技术,实现 V2X 支持车辆编队、半自动驾驶、外延传感器、远程驾驶等更丰富的车联网应用场景。作为智能交通领域的中国智慧和中国方案,中国电信、中国移动、华为等诸多国内企业以及科研院校深度参与了C-V2X的标准化工作,我国在产业化、商业化等方面支持其发展是应有之义,为此,2018年6月,工信部与国家标准委联合印发了《国家车联网产业标准体系建设指南》,因此,国家级的车联网先导区、智能网联汽车测试区等都是围绕这一标准开展终端、设备、整车测试验证工作的。在具体的商业化场景落地方面,智慧港口、无人矿山等领域都取得了显著的成绩,但在开放的道路交通领域仍然任重道远。C-V2X车联网是相对独立的一张网,它的主导者是国家政府,具体的执行者是交通管理部门,参与者则包括方案商、主机厂、设备商、终端商等。有学者主张将C-V2X车联网与商用车联网、甚至车内网三网融合发展,笔者认为这个提法值得商榷,从道路运输安全,当然不是传统的安全而是网络和数据安全的角度来看,保持C-V2X车联网的相对独立性非常重要,而且基于C-V2X车联网车路协同的道路运输生态的主导者必须是政府的交通运输管理部门。03C-V2X车联网的价值首先看下面两张图。

图2、长沙市湘府西路交通指示牌

图3、南京白下高新区数字化交通指示牌我们常说交通行业的数字化转型,转什么?举个简单的例子,办公的数字化转型就是办公自动化,一方面提高了办公的效率,另一方面不再使用纸张和打印设备,节约了成本。在C-V2X车联网车路协同技术下交通数字化转型应该坚持同样的思路,在保持有形的沥青水泥道路主体基础设施的前提下,诸如图2、图3等这样的指示、警示、信号等钢板立柱形式的有形附属设施要去掉而用数字化方式表达,减有形设施代之以数字化设施,同时增加RSU、视频、雷达等新型附属设施建设,“一加一减”体现了行业转型升级、高质量发展的提质换挡要求。通过C-V2X车联网的V2I的方式在车机端用数字孪生的方式指引驾驶人员,也就是将数字化的标识标线指示等信息通过RSU、云平台等实时动态推送到车端主机屏幕上,而且通过路端部署的感知设备可以为车端驾驶员提供超视距的感知能力,既可以做到眼观六路,也可以做到耳听八方,比有形的附属设施提供更丰富的动态场景感知能力,使驾驶过程更安全更高效。这就像商业导航地图提供的服务一样,但是C-V2X车联网在信号感知、超视距、实时性等诸多方面有商业导航地图不可企及的优势。这是笔者认为的C-V2X车联网的一个价值所在,减掉有形的设施,既节约成本,又降低了设施的安装维护对道路交通秩序的影响。但这并不是一蹴而就的事情,在汽车制造端要有强制的车载OBU配置的要求应该是前提条件,这个在法律法规上需要予以明确。在车联网路侧设施和通信设施的建设则可以遵循由线及面、由城市到乡村的路线。也就是在车辆进入C-V2X车联网车路协同的路段后,驾驶员通过V2I的方式实现车路协同式的驾驶,在非网联路段,依然采用依靠人眼观察路上及路侧的标识标线等进行驾驶。循序渐进逐步由线及面,直至全面实现C-V2X车联网车路协同的方式,这是一种具有颠覆式的道路交通运输形态和方式的重构。现在很多城市的智能网联公交车就是这样的一个场景,主要是侧重于通过V2I对路口信号的协同感知、优先通行,应该说是C-V2X车联网车路协同一个不错的入门场景的切口。C-V2X车联网另一个价值所在自不必说,必定是自动驾驶,自动驾驶的场景主要有自动驾驶出租车、自动驾驶干线物流、无人配送、无人巴士、封闭园区物流、无人矿卡,这是李彦宏的《智能交通》一书中总结的,显然乘用车并没有在此之列。笔者也认为乘用车的自动驾驶落实是十分困难的,上述6种场景基本都是有特定区域或者线路属性的,乘用车要天南海北地行驶,将C-V2X车辆网设施覆盖到全国道路的每一个角落,短期内是基本实现不了的,基于特定场景的自动驾驶相对来说更容易一些。自动驾驶相对人类驾驶员的优势在于其更遵守规矩、严格遵守交通规则,它不会疲劳驾驶、不会超速驾驶、不会乱加塞乱变道等等,而这些都是人类驾驶员造成交通事故的人为因素,从这个方面上说,自动驾驶是更安全的,可以减少交通事故的发生。目前,国家级车联网先导区、智能网联汽车测试区、双智建设城市基本上都是开展基于C-V2X车联网车路协同的测试及试验工作,也取得了一些比较可喜的成绩。但测试终归要走出试验场,商业化才有意义,深圳市智能网联汽车管理条例开了一个先河,深圳市是5G建设先行示范城市,又有比较完善的城市交通信息网络基础设施,为C-V2X车联网的建设奠定了很好的基础,我们有信心对深圳的自动驾驶拭目以待。04有关建议和说明
古语云:“工欲善其事必先利其器”,交通行业也有一句行话:“要想富先修路”。首先,数字化、新基建新形势下,我们交通行业要修的“路”就是C-V2X车联网,这是基础性工作。
2020年《交通运输部关于推动交通运输领域新型基础设施建设的指导意见》就明确了“协同建设车联网,推动重点地区、重点路段应用车用无线通信技术,支持车路协同、自动驾驶等”,也明确了“提升交通运输行业北斗系统高精度导航与位置服务能力,推动卫星定位增强基准站资源共建共享,提供高精度、高可靠的服务。”这些都是重要的新型信息基础设施,也是新基建的重要内容,国家已经明确了基础设施建设可以适度超前,如果没有这些基础设施的支持,我们讲的车路协同、自动驾驶就会成为无源之水无本之木。
其次,业界要更加务实地推进C-V2X车路协同这件事,而不是堆砌概念,贩卖概念不是创新,而是噱头,笔者最近听到了车城网、车城协同、泛V2X等诸多令人一头雾水的说法,泛V2X如果理解没错的话就是商业导航地图的另外一种提法吧。在车联网建设先导区开展无人船测试,这种场景是绞尽脑汁要与众不同,而不是别出心裁的技术创新,笔者倒觉得到航道上测试意义更大,大江大河的航道远比测试区的一个小水塘更有价值和实践意义。最后,区分一下自动驾驶和无人驾驶两个概念的不同,一般来说,可以通用。但严格意义上说是有差别的,自动驾驶就是由系统操控的汽车,因此只有符合L3级以上定义的汽车才叫自动驾驶,否则叫辅助驾驶。无人驾驶的概念可以定义为“主驾无人”,主驾无人只有L5级的自动驾驶才可以做到,另外一种情况是汽车的远程驾驶,可以做到主驾无人,因此,也可以称之为无人驾驶。C-V2X车联网条件下,笔者认为城市公交车的远程驾驶是比较可行的落地场景,一是线路固定,二是可以解决公交驾驶员过度劳累的问题,三是群众的获得感、体验感更强更直接。参考资料:1、蜂窝车联网(C-V2X),陈山枝、胡金玲等,人民邮电出版社。2、智能交通-影响人类未来10-40年的重大变革,李彦宏著,人民出版社。
3、国家级车联网先导区的V2X车路协同架构研究及应用探索,朱曦宁等,中国新通信,2021年11期。



 广告
广告 



最新资讯
-
越野出行指南针评价结果发布【方程豹 豹5】
2026-04-01 12:17
-
招商车研助力长安汽车在重庆获批L4级自研Ro
2026-04-01 09:48
-
是德科技推出面向高校的半导体实践教学实验
2026-04-01 09:03
-
全新HexaRev运动平台+HyperDock座舱技术,
2026-03-31 17:05
-
FOCAL发布第二代SLATEFIBER系列,解锁旅途
2026-03-31 16:57
