




 广告
广告





















































某纯电动汽车减速器加速异响问题分析与减速器优化

在传递扭矩的瞬时突变工况下,纯电动汽车传动系统和驱动电机的结构特性容易引起整车产生冲击、噪声与抖动等问题,严重降低驾乘舒适性。系统性阐述某纯电动汽车加速撞击异响问题的分析解决过程,建立基于电驱动系统试验台架的排查方法,根据齿轮啮合间隙理论和整车扭矩控制机理,提出具体的工程控制措施与方案,优化电机扭矩过零策略,通过实车实验验证改进方案的有效性,有关结论对解决纯电动汽车传动系统在瞬态工况下的振动噪声问题,具有较重要的工程指导意义。
关键词:声学;纯电动汽车;减速器;齿轮间隙;扭矩控制;异响噪声
作者:张军,焦明,岳中英,常玉朋,黄循奇
吉利汽车研究院 (宁波) 有限公司,浙江,宁波
与传统燃油车相比,由于纯电动汽车动力传动系统缺少飞轮、离合器和挠性联轴器等减振零部件,低转速下扭矩输出大,时间响应快。所以,在急加速和减速工况,如起步、制动、换挡等过程中,传动系统扭矩传递发生瞬时突变容易引起整车冲击噪声和抖动等问题,严重降低驾乘舒适性。
刘必华等[1]建立了纯电动汽车传动系统的线性集中质量模型,进行了固有特性和灵敏度的分析;Ravichandran等[2]通过仿真分析方法,设计了一种开关模式控制系统,分别在正常啮合与侧隙过渡工况进行切换,以解决电动车的瞬时耸动问题;于蓬等[3]通过前/后馈主动控制仿真,优化悬置设计,改善集中驱动式纯电动车抖动问题;Jung 等[4]对汽车用永磁同步电机转矩波动控制策略进行了研究,提出扭矩优化控制策略,降低电机转矩波动引起的整车抖动问题;陈煜等[5]发现差速器齿轮垫片摩擦性能问题可能导致纯电动车行驶转向过程中出现异响。但国内外对电动车瞬态工况噪声问题的研究较少,还没有形成系统性的工程指导方法。
01整车加速异响问题识别与测试分析
高度集成化是新能源汽车电驱动系统的发展趋势与方向,这符合整车轻量化与车型平台化的开发要求,可以提升动力布置设计与空间利用率,还可以降低能耗与成本,除了高能效的要求之外,NVH 性能与驾驶舒适性也是关键性能指标之一。
问题描述
某纯电动轿车在以40 km/h车速直线行驶时,在轻踩油门踏板的加速过程中,前机舱内存在明显的撞击异响声。由于电动汽车低速行驶时背景噪声低,没有发动机噪声的掩蔽效应,该异响容易让驾乘人员产生不安全感,驾驶品质严重减低,容易引起市场用户的抱怨。通常,这种整车瞬态冲击异响产生原因较多,异响机理较复杂,其影响因素也较多,而电驱系统的高度集成化也增大了此类异响排查与解决的难度。
该车搭载了前置前驱的集成式电驱动总成,电机为永磁同步无刷电机,单档减速器、逆变器和电机采用的是整体集成的结构形式。减速器采用的是高速轴承和两组平行轴式斜齿轮副,增加了啮合重合度,以降低啸叫噪声。其中,电机输出轴与减速器采用花键连接方式,整体的电驱传动路径表现出“硬连接”特征,缺少使扭矩或转速波动衰减的零部件。与多档减速器方案相比,单档减速器的工作转速更高,对齿轮传动的散热与润滑要求也更高。
整车异响噪声测试分析与诊断
经主观评价,可以大致判断出此加速异响源在前机舱内,但是具体异响发生位置很难通过主观识别判断。因此,为了分析排查此噪声特征与诊断潜在的声源位置,分别在左、右转向节、悬置主、被动侧、电机侧端盖、减速器侧端盖位置以及差速器两侧等分别布置了大量的振动加速度传感器,并通过CAN 总线同步采集电驱动总成的转速和转矩等信号,如图 1 所示。测试过程为使车辆在平直光滑路面上缓慢加速到30 km/h左右之后松开油门滑行,再轻踩油门提速到初始车速,反复进行多次测试,采集电驱传动系统的撞击数据。
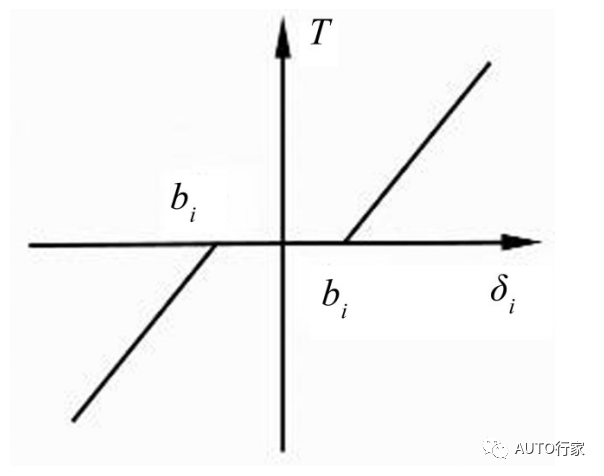
图1 整车测试时的传感器布置
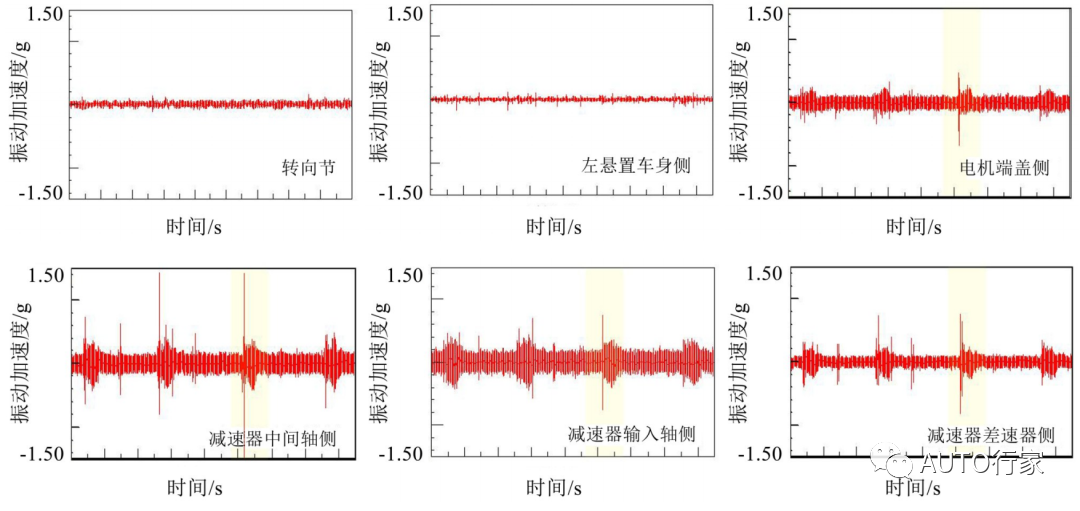
图 2 振动加速度时域测试对比
如图 2 所示,通过各位置振动时域特征分析和音频回放时主客观对比辨识,发现电驱动总成本体位置都具有振动冲击特征,并且在减速器中间轴端盖处的瞬时冲击最为明显;而在电机侧端盖、差速器侧和各悬置主动侧支架的振动冲击幅值相对较小,振动音频回放的撞击声也较小;除此之外,与驱动半轴相连转向节和各悬置被动侧都没有发现振动冲击的现象。因此,可以初步排除了驱动轴外球笼与轮毂轴承接合面的粘滑异响[6],排除悬置的撞击问题,以及排除电机的轴向窜动撞击,推断此异响可能发生在电驱动总成减速器内部的中间轴附近。
截取图 2 的异响典型时域段进行细化分析,根据如图 3 所示的电驱动总成减速器侧端盖测试结果,在低速滑行后的急加速工况,CAN 通道的电机输出扭矩从6 N/m下降到0之后快速地以特定斜率上升。在扭矩过零位置,电机转速出现明显下降,减速器侧端盖振动信号出现瞬时冲击的突变峰值。所以,此异响基本可以推测为急加速时,由于减速箱存在的传动间隙,电机输出扭矩快速变化引起齿轮之间的单侧撞击所导致。
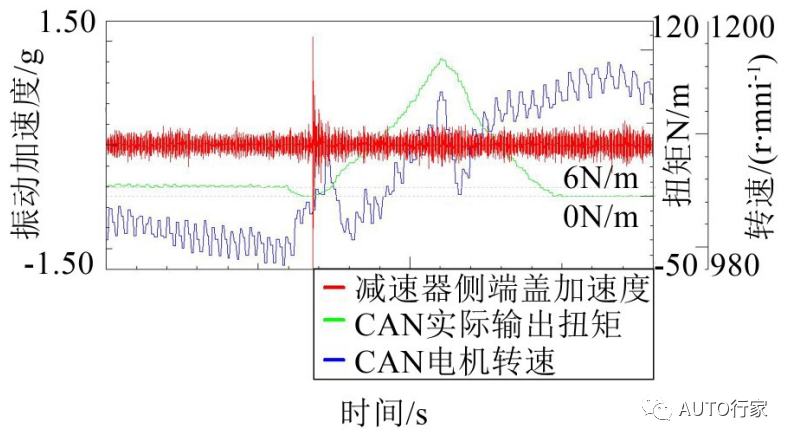
图 3 减速器端盖振动的整车测试
02基于电驱台架的异响测试排查
为了更准确和快速地识别减速箱的异响问题,在电驱动系统总成台架上进一步开展排查工作。如图4所示,采用同样的整车悬置安装方式,提取异响工况下的电机转速和输出扭矩波形作为台架的激励载荷进行加载,先利用声学照相机辅助识别异响源的位置,再同步测试电驱总成壳体上的振动噪声信号。如图 5 所示,在减速箱中间轴附近端盖表面的中高频声辐射能量较大,这与整车振动测试时对异响位置的推论相符合。
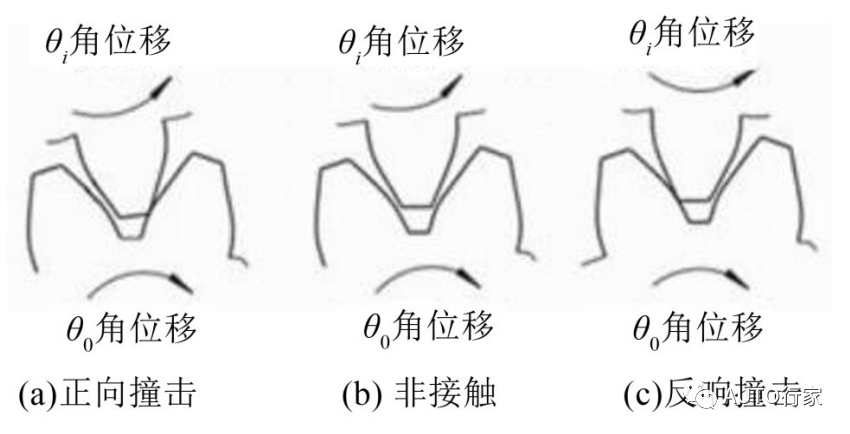
图 4 电驱动总成的台架测试

图 5 基于声学相机测试分析
根据如图 6 所示的台架测试结果可知,减速箱端盖振动的信噪比较高,振动通道的干扰噪声幅值明显小于整车的测试结果,而冲击峰值特征接近于整车工况测试时的时域形态,并且冲击特征的幅值更大,人耳能够更清晰地主观辨识出复现的撞击异响,由于整车与台架扭矩模型的差异,在异响发生时刻的转速和扭矩略有偏差。
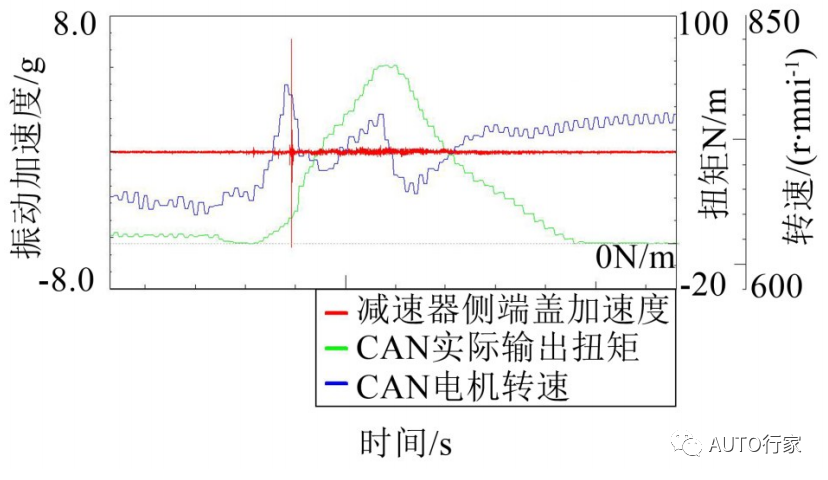
图 6 减速器端盖振动的台架测试
因此,基于电驱动系统的试验台架装置,参照如图 7 所示的减速器内部结构特点,可以快速进行异响问题的试验排查分析,主要排查工作的结论如下:
(1)分别在电机输出轴与减速箱的连接花键处、差速器与驱动半轴之间填充高强度的紧固胶,如图8所示,换装之后经台架试验验证,撞击异响现象都没有变化;
(2)拆除减速箱中间轴或者降低加载的电机转速波动(如图9所示),都能够消除异响;
(3 )换装减小二级齿轮副侧隙试制样件之后,主观评价撞击异响没有明显变化;
(4)对减小一级齿轮副侧隙试制样件进行换装试验,主观评价撞击异响有较明显降低,客观测试的冲击峰值也有下降。因此,根据以上电驱动总成台架排查结果,可以推断出急加速时撞击异响产生位置很可能是在减速器的一级齿轮副。
但是,由于减小齿轮副侧隙的方案对齿轮啮合的润滑性能影响较大,需要进行大量的减速器性能验证工作,成本高,时间长。所以,需考虑能否通过扭矩与转速标定优化快速解决该车型急加速工况下撞击异响问题。
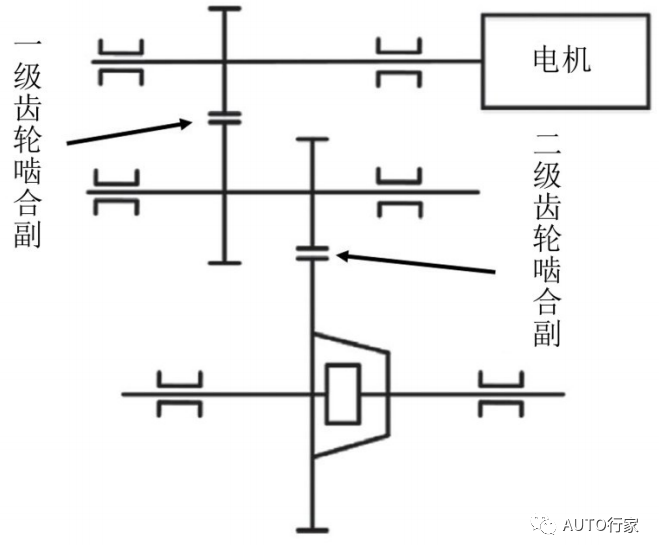
图 7 减速器传动示意图
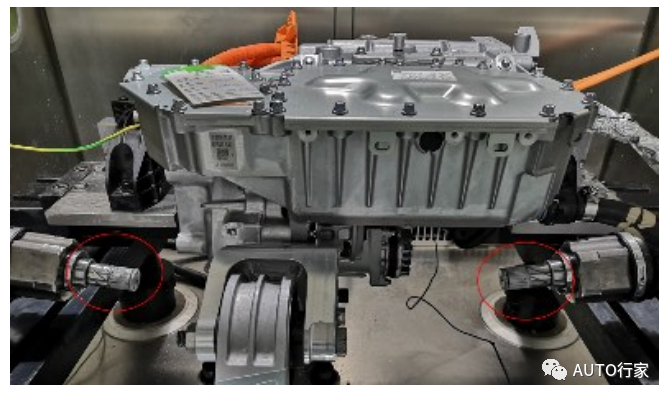
图 8 花键间隙紧固胶试验
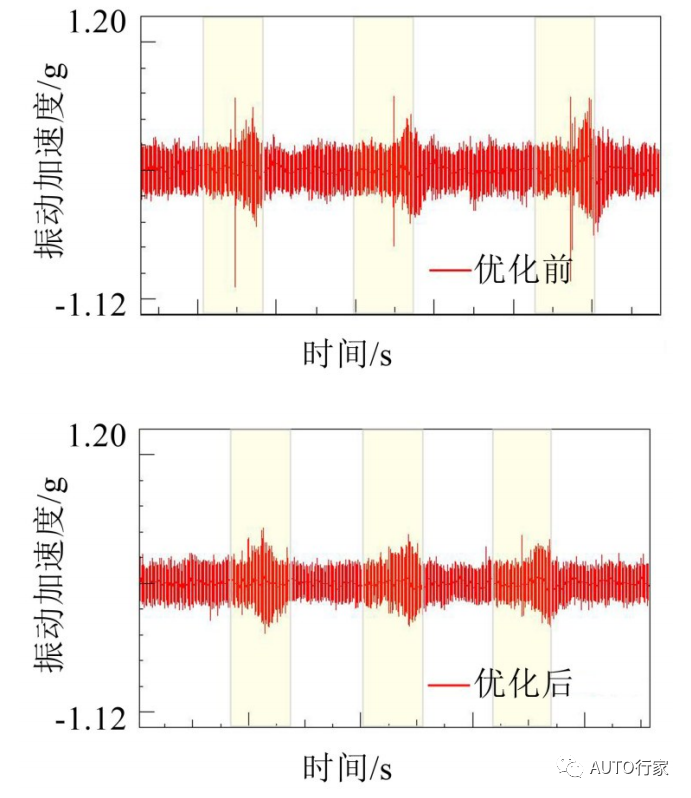
图 9 转速波动对减速箱异响影响的台架测试对比
03减速器异响原因要素的分析
基于整车与台架的异响测试分析结果,可初步得出此异响问题不仅仅与传动系统的机械结构相关,也与扭矩控制方法有较强的关联性。
对于减速器机械传动的结构设计而言,由于考虑润滑、热变形和磨损等因素对齿轮副动力传动的影响,啮合齿轮之间必须有一定的齿侧间隙。在传动扭矩或负载发生突变情况下,齿侧间隙过大可能引起齿轮啮合的振动冲击及噪声问题,并影响整车驱动扭矩传递的稳定性。虽然齿侧间隙越小,扭矩传递就越稳定,但对齿轮制造加工与安装精度的要求都急剧提高。对于新能源汽车的电驱动减速器而言,由于其转速高、速比大和挡位少等特点,必须保证较合理的齿轮侧隙,保证在啮合齿廓之间形成具有足够厚度的润滑油膜,并补偿制造与安装误差以及热变形等对齿轮传动造成负面的影响。
机械传动结构的原因要素
(齿侧间隙)
考虑到齿轮传动系统存在时变啮合刚度、传递误差、阻尼和齿侧间隙等非线性因素,国内外已经进行了大量的研究[7-8]。如图 10 和图 11 所示,为了分析电驱动系统齿轮间隙在啮合过程的作用,通常引入齿侧非线性分段函数 F (δi)表示齿轮动态啮合力,以研究不同啮合接触状态下的齿轮动态特性(见图12)。
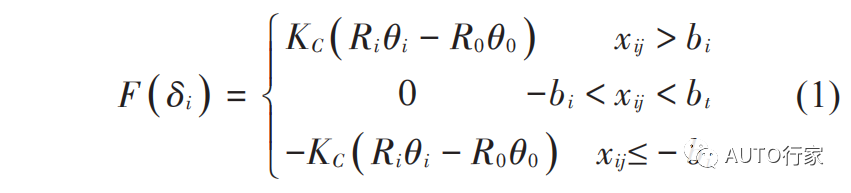
式中:δi为啮合齿轮的动态间隙,xij表示齿轮副之间传递误差,bi 为单侧齿轮间隙长度,Ri 和 R0 分别是主、从动轮的基圆半径,θi和θ0分别为主、从动轮的角位移,KC为齿轮啮合刚度。
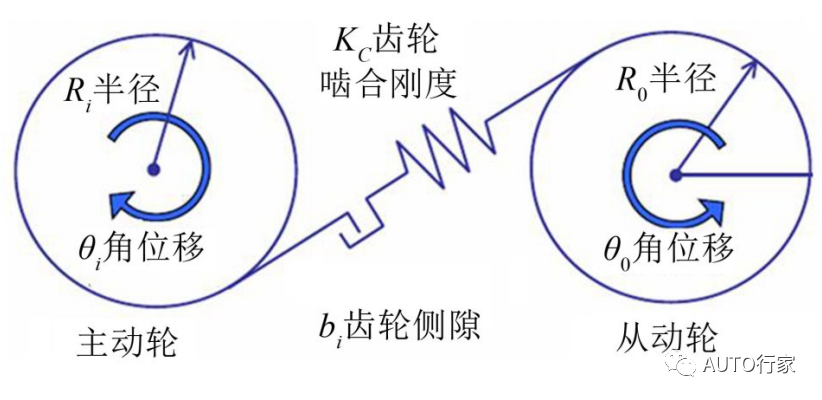
图10 齿轮传动示意图
图 11 齿轮间隙模型示意图
图 12 齿轮撞击的示意图
标定控制方面的原因要素
(扭矩策略)
由于电驱动传动系统的“硬连接”特点,其没有传统燃油车的离合器、柔性联轴器或液力变矩器等传动减振零部件,并且驱动电机总成具有特有的调速与扭矩输出特性,响应快,换向快,扭矩变化率大。因此,在整车低速行驶时的急加速工况,容易出现传动系统的冲击噪声振动问题。
从整车扭矩控制策略的标定优化方面,合理匹配加速踏板开度、电机扭矩输出幅值、扭矩上升速率等因素,结合传动系统间隙现状与动力响应性能的基本要求,可以在电机扭矩正、负切换过程中,精细标定扭矩过零阶段的“靠齿”过程,缓冲齿轮啮合过程中的冲击程度,从而改善或消除撞击现象[4]。在舒适性模式下的加速工况下,扭矩标定策略通常应遵循动力响应及时和平顺的原则,无冲击抖动问题,主要的调整手段有减小加速踏板的滤波系数、增加扭矩过零的靠齿时间以及降低扭矩上升斜率等;而在非过零状态,则需增加扭矩响应速度,减小动力迟滞感,如图13所示。
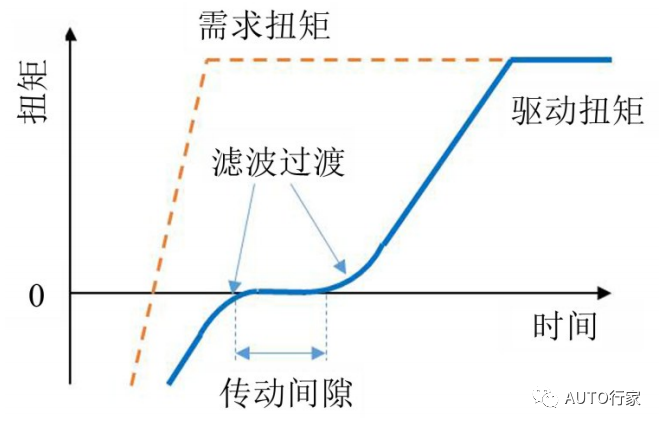
图 13 电机扭矩过零策略的示意图
除了对传动侧隙和扭矩过零策略进行优化控制之外,根据齿轮传动系统的动力学理论,还可以采取提高减速箱机油黏度,增加齿轮拖曳力矩,适度增大主动轮惯量,减小被动轮惯量,调整齿轮轴的扭转刚度,控制轴系的轴向窜动量,避免支承轴承内部撞击等措施,改善电驱动系统减速器的瞬态冲击现象。
04实车标定优化与验证
根据以上的机理分析,考虑成本和后期整改的工程可行性,主要从电驱动过零扭矩输出的策略方面进行标定优化。经多次调整标定参数与验证,在不显著降低动力响应速度条件下,在低速行驶的急加速工况下,通过触发过零控制逻辑,对油门踏板信号通道进行抛物线函数滤波,适度增加靠齿时间,略微降低电机扭矩升高率,减缓扭矩过零对传动系统的冲击,如图14所示。
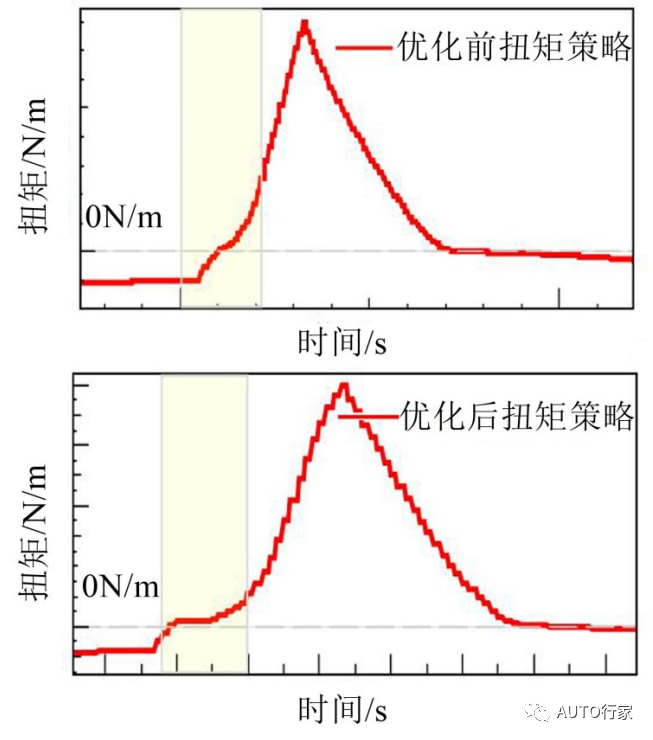
图14 电驱动总成扭矩过零策略的优化对比
经实车驾评与对比测试验证,急加速工况下的动力响应略有降低,但还在可接受范围之内,主观上几乎感知不到撞击异响,减速器端盖的冲击振动特征也基本消失,如图15所示。
图 15 标定优化前、后减速器端盖振动测试对比
05结语
本文以某纯电动车加速工况下撞击异响问题为研究对象,系统性地阐述了其减速器瞬态冲击噪声问题的测试分析与排查过程,基于电驱动系统的试验台架,高效地识别出异响位置;并且从齿轮传动机械结构和扭矩控制策略优化两个方面,提出了具体的工程解决措施与方案。本文还通过电机扭矩过零标定参数的优化,解决了该纯电动车型的加速异响问题,通过实车试验验证改进措施的有效性,这对于解决类似的电驱动系统瞬态振动噪声问题具有较重要的工程参考价值。
【参考文献】
[1]刘必华,宋田堂,林连华,等. 纯电动汽车传动系统扭振特性灵敏度分析及优化[J]. 传动技术,2017,31(2):3-7.
[2] RAVICHANDRAN M, DOERING J, R KEVIN. et al. Design and evaluation of EV drivetrain clunk and shufflemanagement control system[C]//2020 American ControlConference, 2020: 4905-4912.
[3] 于蓬,章桐,孙玲,等. 集中驱动式纯电动车动力传动系统扭转振动研究[J]. 振动与冲击,2015,34(10):121-127.
[4] JUNG W P, DAE H K, JONG M K, et al. Improvement ofcontrol characteristics of interior permanent-magnet synchronous motor for electrical vehicle[J]. IEEE Transactions on Industry Application, 2001, 37(6): 1754-1760.
[5] 陈煜,张军,陈丰土,等. 电驱总成转向引起的差速器异响诊断与分析[C]//SAECCE2020,2020:1179-1182.
[6] 杨朝,张军,沈蜜,等. 变速器输出端起步粘滑异响分析与改进措施[J]. 噪声与振动控制,2019,39(3):128-132.
[7] 李英明,陈卫东,陈奇,等. 齿侧间隙对齿轮副非线性振动特性的影响研究[J]. 机械传动,2013,37(5):1-4.
[8] HAMED M, HASSAN S. Analysis of nonlinear oscillations in spur gear pairs with approximated modelling ofbacklash nonlinearity[J]. Mechanism and Machine Theory,2012, 51: 14-31



 广告
广告 



最新资讯
-
用于赛车运动车辆动力学测量的光学传感器
2026-03-18 21:31
-
联合国法规R86对农林拖拉机灯光安装的工程
2026-03-18 12:20
-
联合国法规R78对L类车辆制动系统的工程化约
2026-03-18 12:16
-
联合国法规R77对机动车驻车灯静态可见性的
2026-03-18 12:16
-
TCT亚洲展启幕!思看科技人气爆棚,这些产
2026-03-17 19:17
