




 广告
广告





















































电动汽车减速器NVH仿真研究与优化

摘要:减速器是电动汽车电驱动总成的关键部件,是电动汽车的主要噪声来源之一。减速器噪声水平直接关系电动汽车整车噪声(Noise)、振动(Vibration)、声振粗糙度(Harshness)(简称NVH)性能和乘客舒适性。以某款减速器为研究对象,分析了减速器振动噪声产生机理。在此基础上,引出了评估减速器NVH的4个仿真指标:减速器传递误差、接触斑点、轴承座动刚度和模态。从这4个指标出发,分别进行了仿真研究和试验对标。结果说明,仿真和试验结果一致性较好。基于以上研究成果,判定该减速器二级齿轮的传递误差和接触斑点需要优化。通过加强轮辐结构和轮齿修形等优化手段,结果显示,二级齿轮仿真传递误差和接触斑点得到改善;优化方案装车试验测试的噪声也得到了改善。关键词:减速器 电动汽车 NVH 传递误差 接触斑点 动刚度 模态 噪声
0 引言
在政策引导、能源、环境等多重因素下,电动汽车进入了高速发展阶段。不仅国家标准对电动汽车的噪声(Noise)、振动(Vibration)、声振粗糙度(Harshness)(简称NVH)要求愈加严格,乘客也对电动汽车的噪声品质提出了更加严格的要求。控制噪声振动已经成为汽车的关键指标之一。电动汽车中没有汽车发动机噪声,减速器等动力元件的噪声凸显,已成为电动汽车噪声的主要来源之一。因此,对减速器NVH进行研究具有重要意义。对于减速器振动噪声的研究始于20世纪,国内外许多学者进行了研究。Niemann等通过实验得出减速器噪声的经验公式,可以定量快速预测噪声,但文考虑的因素有限,精度差[1]。也有学者对不同齿形、重合度、直/斜齿、齿数、压力角、齿宽、精度等级等对减速器振动的影响进行了研究,但没有形成系统的理论[2-5]。还有很多工程案例和研究,是通过齿轮修形优化减速器的齿轮啸叫,但齿轮修形方式比较单一,方案移植性差[6-10]。此外,还有一些针对减速器的结构路径、声辐射、声品质的研究,通过对悬置、副车架、壳体结构的优化,实现减速器的噪声、声品质的提升,但没有从减速器激励源头做进一步探索[11-13]。本文中以某款减速器NVH作为研究对象,分析了减速器的振动噪声机理,并从传递误差、接触斑点、动刚度、模态等维度对该减速器进行了仿真和实验研究。最后提出了优化方案,并通过实验对优化方案进行了验证。
1 减速器振动噪声机理根据齿轮不同工作状态,可将减速器噪声分为啸叫(Gear whine noise)和轮齿拍击(Gear rattle noise)。
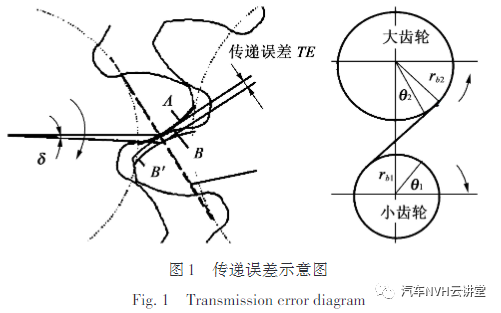
1.1 减速器的啸叫减速器齿轮啸叫是由于齿轮在运行过程中产生周期性的激励,从而引起齿轮副、轴系、壳体的振动及声音辐射,这些振动和辐射噪声通过传递路径进入车内,产生类似“呜呜”的声音。减速器齿轮的激励主要分为内部激励和外部激励。内部激励主要有刚度激励、传递误差、啮合冲击。1.1.1 刚度激励齿轮重合度不是整数时,齿轮传动过程中,参与啮合的齿数随时间呈现周期性变化,该变化会引起齿轮啮合刚度的变化。1.1.2 传递误差由于系统变形、轮齿变形、制造误差等因素,导致从动轮实际齿廓位置与理论齿廓位置出现偏差,该偏差称为传递误差,传递误差是评价齿轮传动平稳性的重要指标。如图1所示,A为主动小齿轮轮廓,B为被动大齿轮实际轮廓,B'为被动大齿轮理论轮廓。齿轮实际啮合时,主动轮轮廓A转过的角位移和被动轮轮廓B转过的角位移并不相等。传递误差的计算公式为

式中,rb1、rb2分别为主动轮、被动轮基圆半径;θ1、θ2分别为主动轮、被动轮转动的角位移。
1.1.3 啮合冲击由于齿轮加工误差和受载变形,使得轮齿在实际啮合过程中,其啮入点、啮出点偏离理论啮合线,造成啮入、啮出冲击,两者统称为啮合冲击。该冲击是周期性的动态激励,和刚度激励和传递误差激励不同,啮合冲击是一种周期性的冲击力,而刚度激励和传递误差是周期性的波动力和位移。
1.1.4 外部激励除内部激励外,齿轮系统还会因为外部激励产生新的动态激励。比如电机、负载的转矩波动、电磁力和负载的瞬态变化、轴承非线性刚度等。此外,当电机电磁力、压缩机、真空泵、路面激励等引起减速器壳体共振时,也会导致减速器系统产生额外振动。
1.2 轮齿拍击
由于齿轮侧隙的存在,齿轮在传动过程中,会出现齿轮轮齿在接触面和非接触面来回碰撞敲击的现象,称为轮齿拍击。轮齿拍击一般出现在电机或负载不稳定的场合,尤其在电机驱动和回馈切换的时候容易出现。目前,由于齿轮设计精度较高,侧隙普遍很小,而且通过整车加载靠齿策略,已很少出现轮齿拍击现象。
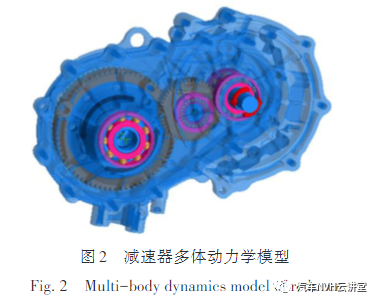
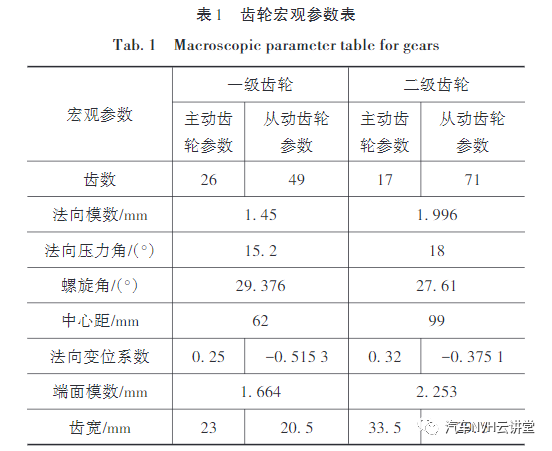
2 减速器NVH仿真与实验研究2.1 多体动力学模型建模本文中研究对象为一款单速比的二级减速器。减速器中均为斜齿轮,齿轮主要参数如表1所示。根据齿轮宏观参数、轴承型号和装配布置等参数,基于Romax仿真软件建模,搭建出齿轮、轴、轴承传动系多体动力学模型。然后,设置齿轮的材料、热处理方式、加工精度、刀具参数、修形参数。对减速器刚度影响较大的因素,比如轮辐、壳体等通过有限元软件Hypermesh进行网格划分,得到各部件有限元网格。最后,将这些有限元网格导入Romax与传动系的多体模型进行耦合连接,完成减速器的完整多体动力学模型。减速器完整多体动力学模型如图2所示。
2.2 传递误差
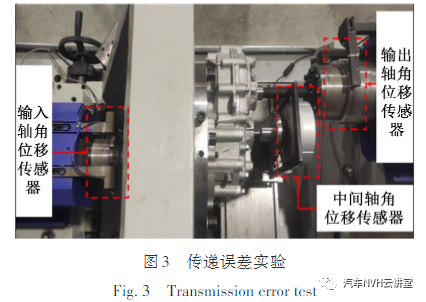
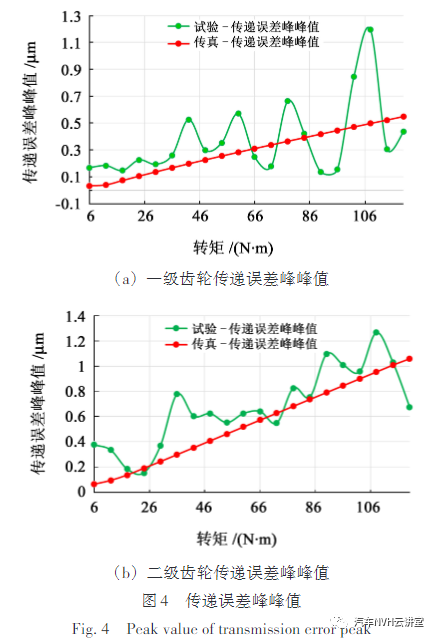
传递误差激励作为减速器最主要的激励之一,是齿轮振动的源头,直接反映齿轮的NVH水平。因此,对减速器传递误差进行仿真和实验,是评价减速器NVH表现的重要手段之一。在传动误差实验台上进行实验,通过圆光栅角度编码器,测量被试减速机输入输出角度,计算传动误差(ET=θin-θouti,其中,i为速比)信号,并根据基圆直径换算到输入齿轮线位移。如图3所示,对减速器3根轴分别布置高精度的角度编码器,从而同步获取它们的时域角度信号。并通过上述传递误差计算方法得到传递误差的实验值。如图4所示,对多体模型设置6~120N∙m的等间距转矩工况(转速为50r/min),将仿真数据和实验数据对比,仿真和实验数据的趋势和大小基本一致。但由于样机制造、装配、实验台精度、数据采集和处理误差等因素影响,使得实验数据波动较大;仿真数据则呈现出理论化的线性。两对齿轮的传递误差峰峰值随着转矩增大而增大。这是由于转矩越大,整个系统变形也越大;同时,大转矩下,系统刚度波动也变大了。通过对比两对齿轮的传递误差,二级齿轮的传递误差峰峰值要比一级齿轮大,这与二级齿轮受力有较大吻合。
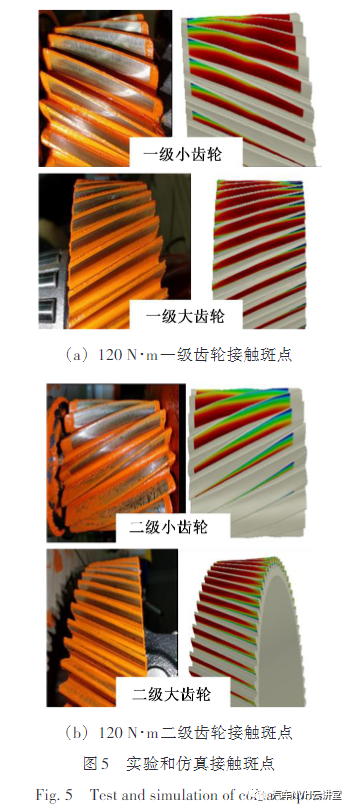
2.3 接触斑点接触斑点不仅影响齿轮实际重合度,而且能够反映齿轮传动平稳性和啮入啮出冲击程度。因此,接触斑点也是评价齿轮振动噪声的一个重要指标。结合接触斑点实验,还可以对仿真模型进行校准。为了解该减速器的接触斑点情况,进行了接触斑点实验,并基于第2.1节中建立的多体动力学模型行了接触斑点仿真。实验和仿真接触斑点的对比结果如图5所示。在峰值转矩120N∙m工况下,两对齿轮均有不同程度偏载。尤其是二级齿轮,可以看到明显的齿向、齿廓偏载。尽管此时接触斑点面积大于90%,但这种偏载依然不利于NVH和寿命。通过实验和仿真对接触斑点进行研究,可以为后期的微观修形提供很好的指导。
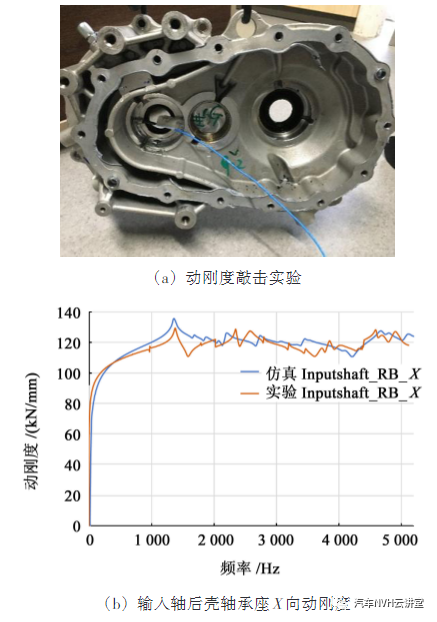
动刚度是部件在动载荷作用下,抵抗变形的能力。减速器在实际运行过程中,齿轮激励都是通过轴承引起壳体振动,振动(噪声)通过结构路径和空气路径传递到车内。因此,轴承座的动刚度水平决定了齿轮激励传递到车内的能量大小。动刚度越大,传递到车内的能量就越小。动刚度的计算公式为

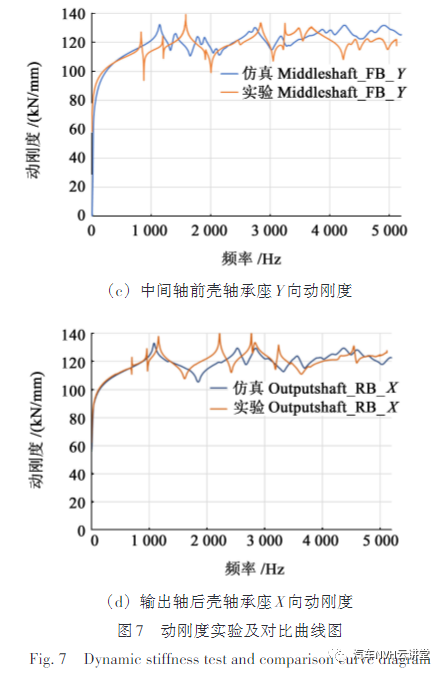
式中,k为减速器壳体全局静刚度;ξ为阻尼比,ξ=c/(2mωn);λ为频率比,λ=ω/ωn,ω为简谐激振力频率,ωn为系统固有频率。由式(2)可见,动刚度并不是常数,而是随频率的改变而改变。动刚度仿真曲线结果如图6所示。以100000N/mm为目标线,其中,中间轴后轴承Z向(Middle⁃shaft_RB_Z)和输出轴前轴承X向(Outputshaft_FB_X)在1860Hz低于目标值,输入轴后轴承Y向(Input—shaft_RB_Y)在3420Hz低于目标值,此外,在4080Hz、4280Hz、4590Hz、5040Hz,输入轴后轴承X向、输出轴前轴承X向和Z向均有不同程度低于目标值,这些低于目标值的点均由减速器的模态导致。
如图7所示,对减速器壳体轴承座进行了动刚度实验。选取了3组数据与仿真数据进行对比。通过对比可以发现,仿真与实验数据动刚度趋势和大小基本一致,但部分峰值点有偏差甚至出现相反的波峰。其原因是:仿真时,对轴承座的处理:用rb2刚性单元抓取轴承座一周的节点,但实验时,只能粘贴在轴承座上某一点。此外,仿真只设置了全局阻尼,实际上每个模态频率阻尼有一定差异。该差异在可接受范围内,因此,通过该模型可以对减速器壳体进行准确地NVH评估和设计指导。
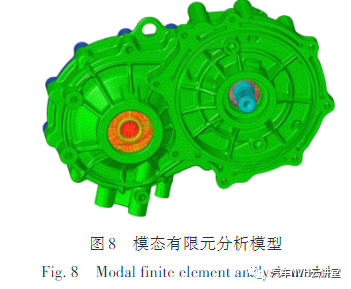
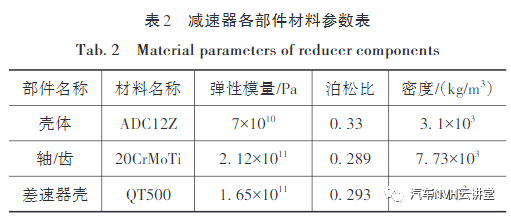
2.5 模态准确计算模态是研究减速器振动和噪声的基础。减速器在内部激励和外部激励作用下产生动态响应,从而引起振动。一旦激励频率和系统固有频率吻合或接近,发生共振,会产生很大的振动和辐射噪声。对零部件模态频率设定标准,已经成为控制NVH的重要手段。应对减速器进行模态分析,并结合试验进行对比,以实现减速器NVH的评估与控制。图8所示为模态求解仿真模型,该模型基于Hyperworks软件搭建。建模过程为:①CAD几何模型简化处理;②CAD几何导入Hypermesh,进行四面体网格划分,单元大小为3mm,设置减速器材料如表2所示;③约束条件定义。整个减速器模型处于自由状态,轴承则进行了刚度简化,各部件之间主要通过刚性进行连接。
为验证有限元模态仿真结果,对样机进行了自由模态实验,结果如图9所示。样机弹性悬挂,根据该减速器的主要模态振型设置锤头敲击点和响应点,实验使用移动传感器法。在减速器样机无齿轮油状态下进行实验。实验结果采用最小二乘复频域法进行模态参数识别,得到减速器的模态频率和振型。由于锤击法模态实验的激振力频率范围不易控制,且减速器结构存在结构阻尼,部分模态不容易激发出来。

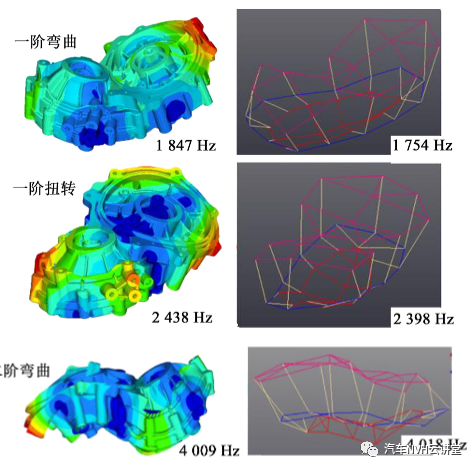
模态振型频率和振型对比如图10所示。关键模态呈1阶弯曲、1阶扭转的振型,仿真与实验吻合,频率略有差异,最大误差为5.3%(1阶弯曲模态)。高频率段选取了2阶弯曲和后壳局部模态进行了对比,振型和实验吻合度都很高。

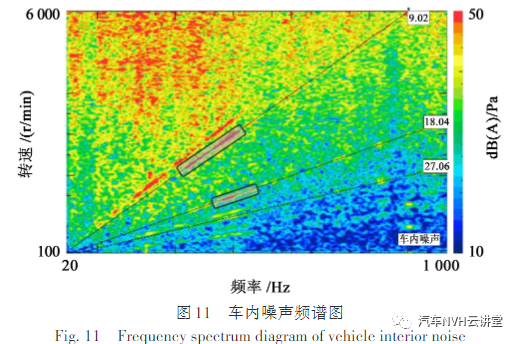
3 减速器NVH优化该减速器样机装车后,全油门加速工况1000~3500r/min转速段噪声明显。如图11所示,整车NVH测试显示该噪声主要由电机8阶、减速器9.02阶、减速器18.04阶所造成。本文中主要解决减速器9.02阶及18.04阶问题,这两个阶次分别是二级齿轮基波及二次谐波。因此,主要考虑对二级齿轮进行优化。
由第2节中的分析结果可知,二级齿轮在2000~3500r/min转速段(处于电机恒转矩段,最大转矩为120N·m)仿真传递误差峰峰值为1.06μm,传递误差较大;同时,仿真的接触斑点有偏载。而此时轴承座动刚度仿真结果是满足设计要求的,减速器模态频率也不在问题频率段上。因此,优化思路主要在为降低二级齿轮传递误差,纠正接触斑点。主要更改点如下:二级大齿轮齿坯结构优化,轮缘加厚(由13.4mm加厚至17.4mm),辐板加宽(由12mm加厚至18mm),如图12(a)所示;轮辐结构优化后,对齿轮微观参数做进一步优化,修形参数及接触斑点优化效果如图12(b)所示。

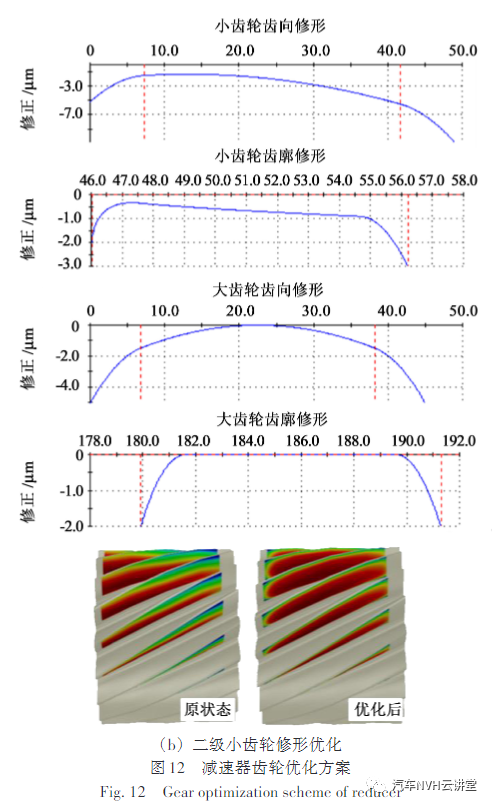
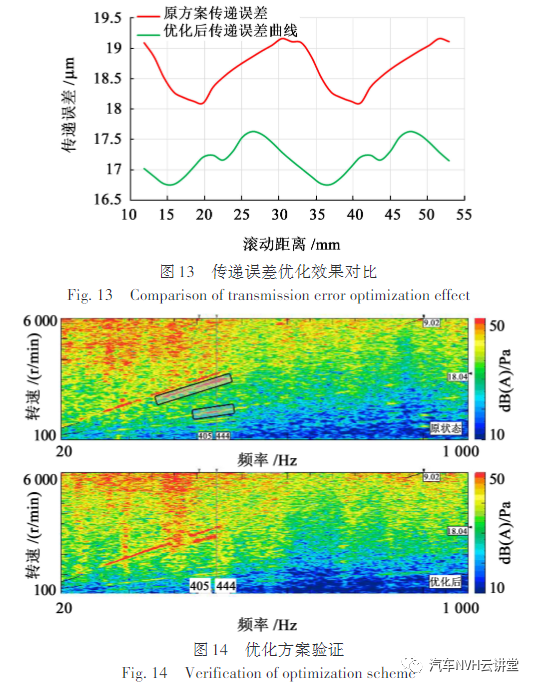
如图13所示,优化后传递误差峰峰值由1.06μm降低至0.87μm。如图12(b)所示,此时接触斑点居中,接触面积也变大。优化样件装车进行验证,其优化效果如图14所示。9.02阶和18.04阶得到明显削弱,但由于传递路径(悬置支架)上还存在405/444Hz的共振带,导致9.02阶未能完全消除。
4 结论基于一款减速器,论述了减速器NVH的研究现状,并简要介绍了减速器的振动噪声机理。在此基础上,引出减速器NVH评估的4个仿真指标:减速器传递误差、接触斑点、轴承座动刚度和模态。并从这4个指标出发,分别进行了仿真研究和试验对标,有如下结论:传递误差激励是减速器最主要的激励源,因此,传递误差是评价减速器NVH的重要指标。齿轮接触斑点不仅影响齿轮实际重合度,而且能够反映齿轮传动平稳性,所以,接触斑点也能反映减速器NVH水平。齿轮激励通过轴承引起壳体振动,因此,轴承座的动刚度水平可以评价减速器壳体NVH设计水平,模态是研究减速器振动和噪声的基础。以上4个指标从减速器激励、路径、响应3个方面可以对减速器NVH进行综合评估。通过4个仿真指标和实验结果的对比,仿真和实验结果具有较好的一致性。4个指标和仿真方法能比较准确地预估减速器NVH水平。该减速器二级齿轮仿真传递误差较大(1.06μm),接触斑点偏载,而此时轴承座动刚度、模态是满足设计要求的。通过对轮辐结构和轮齿修形的优化,二级齿轮仿真传递误差和接触斑点得到改善。实验测试结果显示,优化方案的噪声得到了改善。本文中提出的4个NVH仿真指标可对减速器NVH的优化提供指导。
作者:李沁逸1李俊泓1刘嘉林1李有通1赵海波2作者单位:(1广安职业技术学院智能制造与汽车工程学院,四川广安638000)(2沈阳理工大学汽车与交通学院,辽宁沈阳110159)
来源:Journal of Mechanical Transmission



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
