




 广告
广告





















































一文读懂自动驾驶数据闭环
2021-09-21 18:17:01· 来源:智驾最前沿

6 相关的机器学习技术
最后,谈一下数据闭环所采用的机器学习技术,其实就是选择什么训练数据和如何迭代更新模型的策略。主要有以下几点:
-
主动学习
-
OOD检测和Corner Case检测
-
数据增强/对抗学习
-
迁移学习/域自适应
-
自动机器学习(AutoML )/元学习(学习如何学习)
-
半监督学习
-
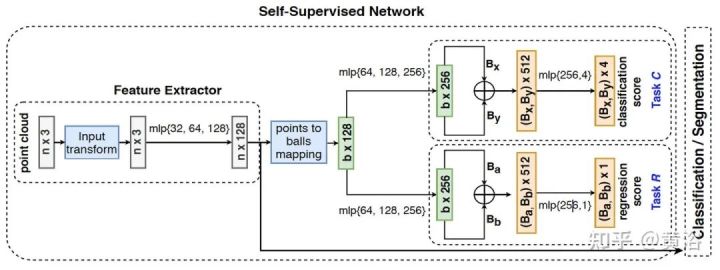
自监督学习
-
少样本/ 零样本学习
-
持续学习/开放世界
下面分别讨论:
1)主动学习
主动学习(active learning)的目标是找到有效的方法从无标记数据池中选择要标记的数据,最大限度地提高准确性。主动学习通常是一个迭代过程,在每次迭代中学习模型,使用一些启发式方法从未标记数据池中选择一组数据进行标记。因此,有必要在每次迭代中为了大子集查询所需标签,这样即使对大小适中的子集,也会产生相关样本。
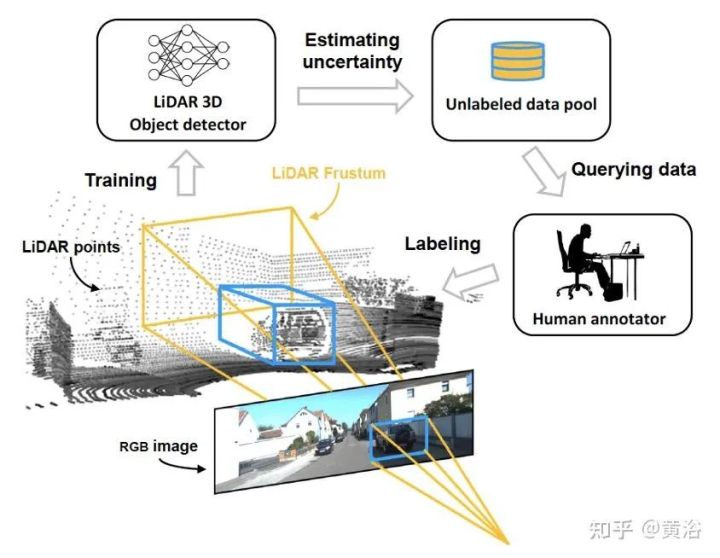
如图是一个主动学习闭环示意图:在无标注数据中查询、标注所选择数据、添加标注数据到训练集和模型训练。
一些方法把标注和无标注数据放在一起,故此采用监督学习和半监督学习进行训练。
贝叶斯主动学习方法通常使用非参数模型(如高斯过程)来估计每个查询的预期进步或一组查询后的预期错误。
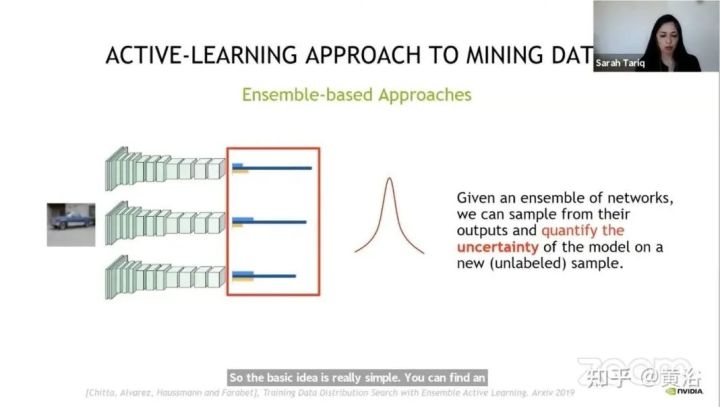
基于不确定性主动学习方法尝试使用启发式方法,比如最高熵,和决策边界的几何距离等来寻找困难例子(hard examples)。
如图是英伟达基于主动学习的挖掘数据方法:
还有其他的主动学习实例方法:
-
“Deep Active Learning for Efficient Training of a LiDAR 3D Object Detector“
-
“Consistency-based Active Learning for Object Detection“



 广告
广告 



最新资讯
-
东扬精测|CLNB 2026 苏州|世界顶尖的测试
2026-04-03 09:48
-
EA-BIM 20005多通道电池阻抗测试仪如何赋能
2026-04-03 09:46
-
自动泊车测试进入厘米级时代——从最新测试
2026-04-03 09:10
-
真正决定城市体验的,不是硬件,而是控制系
2026-04-02 14:26
-
LabVIEW传奇工程师亲临现场,NI测试测量技
2026-04-02 14:24
