




 广告
广告





















































浅析ADAS 毫米波雷达原理与电磁抗扰能力
2021-09-19 09:02:50· 来源:厚势

智能车辆多采用毫米波雷达作为环境感知的传感器,以实现驾驶辅助功能。毫米波雷达系统的电磁抗扰能力将影响车辆辅助驾驶功能的实现和行车安全。文章在对毫米波雷
智能车辆多采用毫米波雷达作为环境感知的传感器,以实现驾驶辅助功能。毫米波雷达系统的电磁抗扰能力将影响车辆辅助驾驶功能的实现和行车安全。文章在对毫米波雷达系统的原理和目标识别理论进行研究的基础上,通过模拟目标激活毫米波雷达系统,并在不同等级场强下进行毫米波雷达系统的抗扰测试。
随着汽车行业的发展,诞生出一批高度电子化、自动化的智能汽车,这些车辆搭载了先进的驾驶辅助系统(ADAS),ADAS 的存在极大提升了驾驶的舒适性,但同时也为行车安全带来了不确定因素。由于智能汽车内部有诸多电子电气系统,这些系统极易受到外界电磁信号的干扰,因此电磁抗扰能力是智能汽车的重要安全性能指标之一。
目前,智能汽车的 ADAS 系统大多将毫米波雷达作为感知环境的传感器,利用毫米波雷达实现对车辆前方目标的检测,通过分析周边车辆及障碍物与自车的相对距离、相对速度等关系实现控制自车的安全距离与安全车速,实现智能驾驶相关功能。因此,积极开展智能汽车毫米波雷达电磁抗扰度测试方法研究具有重要意义 。
1. 毫米波雷达原理
毫米波雷达按工作原理的不同可以分为脉冲式毫米波雷达与调频式连续毫米波雷达两类。
脉冲式毫米波雷达通过发射脉冲信号与接收脉冲信号之间的时间差来计算目标距离。如果目标距离较近,则发射与接收脉冲信号之间的时间差相对较小。由于智能车辆需要根据目标距离计算结果激发相应模块以实现特定功能,因此要求雷达计算目标距离的时间尽可能短,这种情况下就需要系统采用高速的信号处理技术,导致脉冲式毫米波雷达的近距离探测技术复杂、成本较高。在实际应用中,智能车辆一般选择成本低廉、结构相对简单的调频式连续毫米波雷达。
调频式连续毫米波雷达是利用多普勒效应测量得出不同距离的目标的速度,它通过发射源向给定目标发射微波信号,并分析发射信号频率和反射信号频率之间的差值,精确测量出目标相对于雷达的运动速度等信息。
1.1 测距原理
雷达调频器通过天线发射微波信号,发射信号遇到目标后,经目标的反射会产生回波信号,发射信号与回波信号相比形状相同,时间上存在差值。以雷达发射三角波信号为例,发射信号与返回的回波信号对比如图 1(a) 所示。
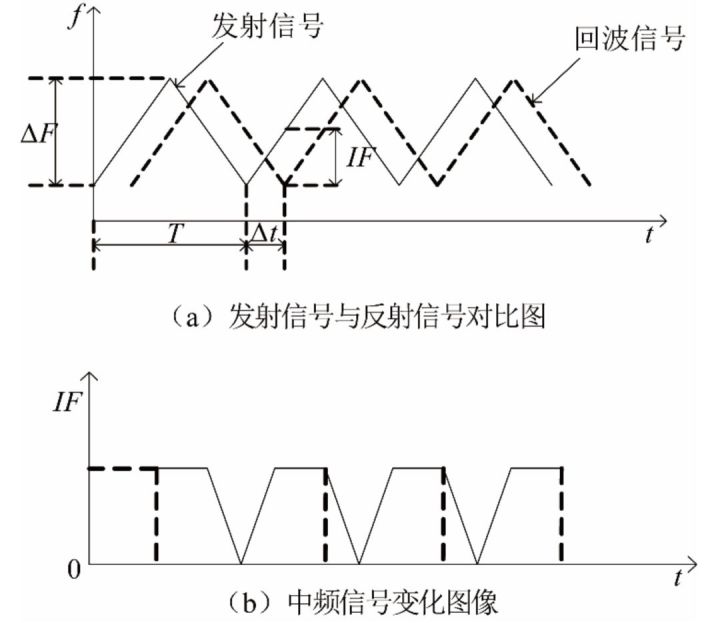
图 1 调频连续式毫米波雷达测距原理
雷达探测目标的距离半径 R 为

式中:Δt 为发射信号与回波信号的时间间隔(ms);c 为光速。
IF 变化图像如图 1(b)所示,发射信号与回波信号形状相同,因此根据三角函数的关系式可得:

式中:T 为发射信号的周期(ms);ΔF 为调频带宽;IF 为发射信号与回波信号混频后的中频信号频率。
根据式(1)和式(2)可以得出目标距离 R 与中频信号间的关系式为:
1.2 测速原理
当目标与雷达信号发射源之间存在相对运行时,发射信号与回波信号之间除存在时间差外,频率上还会产生多普勒位移 f_d,对比图见图 2。
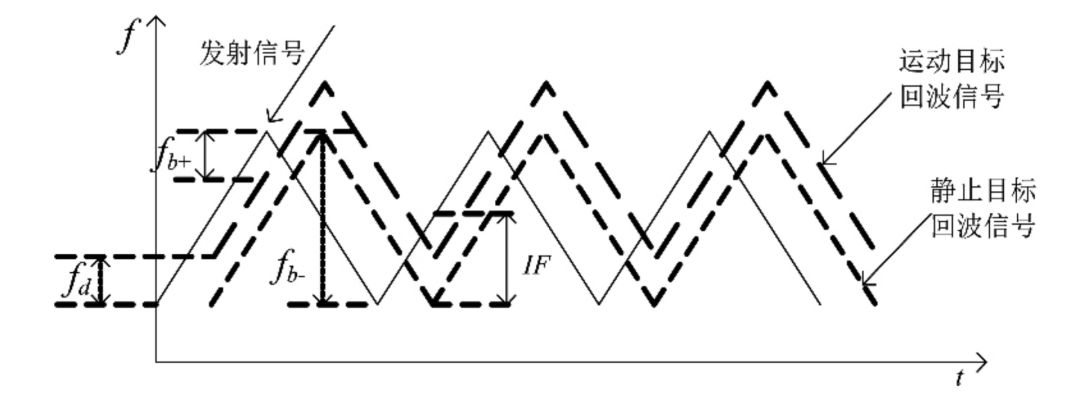
图 2 调频连续式毫米波雷达测距原理
如图 2 所示,中频信号在信号上升阶段的频率 f_b+ 与下降阶段的频率 f_b- 分别用式(4)、式(5)表示:

式中:IF 为发射源与目标处于相对静止状态时的中频信号频率;f_d 为发射信号与回波信号间的多普勒位移,计算公式为:

目标与雷达信号发射源之间的相对运动速度 v 可以根据多普勒原理计算:

式中:f_o 为发射波的中心频率;λ 为发射波波长。
2. 毫米波雷达目标识别系统理论分析

图 3 目标识别流程图
毫米波雷达的目标识别是通过分析回波特征信息,采用数学手段通过各种特征空间变换来抽取目标的特性参数,如大小、材质、形状等,并将抽取的特性参数与已建立的数据库中的目标特征参数进行比较、辨别和分类,流程如图 3 所示。
2.1 特征信息提取
利用发射源与目标处于相对静止状态时的中频信号可以进行目标特征信息的提取,以有效进行目标识别,一般情况下,提取的信息可以分为 5 类:
(1)回波信号参数。回波信号的主要参数有:极点和斜升响应(反应目标结构信息),回波幅相波形(反应目标综合信息),回波频率/时宽/带宽/信号形式(反应辐射源类型);
(2)雷达截面积参数。反应目标材料和形状等信息的 RCS 序列、极值、方差、统计分布和均值等;
(3)运动参数。包括目标运动速度、轨迹、高度等,同时也包括目标微动产生的微多普勒等;
(4)一维、二维等图像参数;
(5)基于极化散射矩阵、散射中心分布和角闪烁的参数。
2.2 特征空间变换
特征空间变换是利用梅林变换、沃尔什变换、马氏距离线性变换等正交变换方法,解除不同目标特征间的相关性,加强不同目标特征间的可分离性,最终剔除冗余特征,达到减少计算量的目的。
2.3 识别算法
识别算法主要有 3 部分内容:空目标去除、无效目标去除和静止目标去除,如图 4 所示。
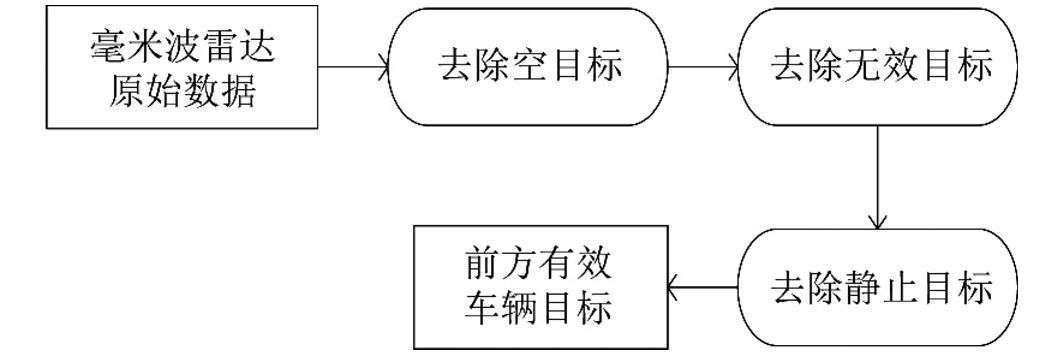
图 4 识别算法流程图
对于空目标的去除,可以通过监测 CAN 相应数据存储位,如果该存储位为特定数值,即表示该信道没有检测到目标信号,此时可以通过简单的代码实现空目标去除。
对于无效目标,其与有效目标的主要区别是目标数据出现时间极短且参数跳跃性比较大,不符合车辆的行驶特征,因此可以通过分析相邻采样点之间的车辆数据变化情况实现无效干扰目标的识别,对无效目标进行去除。
对于静止目标,若本车采集到的自车行驶速度与目标车辆和本车之间的相对速度的绝对值相等,且本车运动方向与检测到的相对速度的方向相反,则可以判定该目标为静止目标。
2.4 目标特征库建立
目标特征库的建立有 3 种方法:
(1)通过实际试验数据建立;
(2)通过半实物仿真数据建立;
(3)通过虚拟仿真数据建立。
实际试验数据目标特征库是由在实际电磁环境中对雷达目标测量得出的数据构成,可信度较高,但同时数据库建立成本较高。
半实物仿真数据目标特征库是由一组半实物仿真数据构成,通过模拟雷达的工作特性,对在微波暗室中的缩比目标模型进行微波测量,得到半实物仿真数据,这种采取紧缩场等近似手段得出的数据具有一定可信度,但也存在成本较高的问题。
虚拟仿真技术是利用计算机对目标进行建模,并对模型的回波进行仿真分析,按照需要修改相应参数,即可获得相关的数据,继而建立目标特征库,这种方式所用的时间短并且成本低,但获取的数据可信度不高。在实际应用中,可以结合实际情况选择合适的方法建立数据库。
3. 毫米波雷达系统电磁抗扰测试环境
毫米波雷达系统的电磁抗扰测试环境包括辐射抗扰度测试系统、暗室音视频监控系统、虚拟环境模拟系统 3 个部分,如图 5 所示。
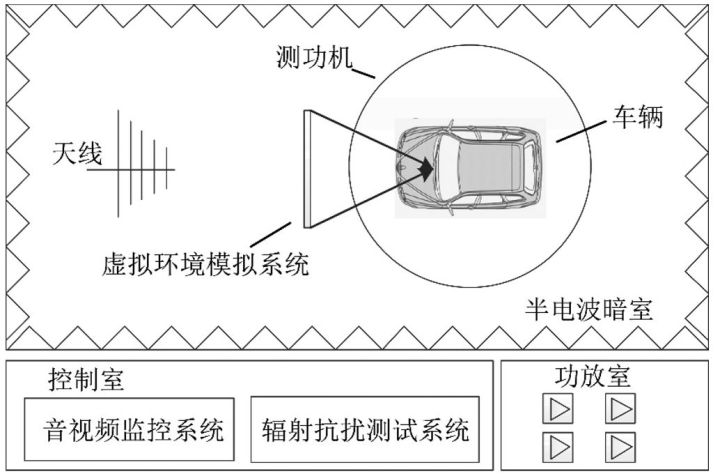
图 5 毫米波雷达系统电磁抗扰测试环境
其中,辐射抗扰测试系统(包括信号源、功率放大器、天线)用于向车辆施加一定等级的场强;暗室音视频监控系统(包括音视频监控设备、显示器等)用于将车辆仪表盘报警信息显示在控制室内;虚拟环境模拟系统是毫米波雷达系统激活的关键,用于向毫米波雷达呈现虚拟的道路环境。
基于毫米波雷达系统的工作原理及目标识别理论,可以在暗室内通过真实反射波和人为构造反射波两种方式激活毫米波雷达系统。
-
当采用真实反射波激活毫米波雷达系统时,可以在车辆前方布置障碍物将毫米波雷达的发射信号进行反射,使雷达模块可以感知预设信息,并向安全测算模块传递该信息,继而激发执行模块。
-
当采用人为构造反射波激活毫米波雷达系统时,可以利用一对微波天线及一台微波收发一体机将具有一定频移的雷达波反馈至毫米波雷达,使其认为前方存在障碍物。
微波收发一体机可以直接读取毫米波雷达发射波的工作频率和周期,并可以人工输入距离 R 和速度 V 的参数。通过计算,微波收发一体机将携带上述两种参数的反馈雷达波发送至毫米波雷达,在车辆前方 R 处模拟一个行驶速度为V的障碍物。
4. ADAS 毫米波雷达系统电磁抗扰测试
4.1 测试过程
试验布置参照 ISO 11451-2:2016 标准,车辆状态设置为:车速 50 km/h、大灯开启、车门闭锁、空调制冷中档状态、风机中档状态、收音机 87.5 MHz、ADAS 相关功能开启。
试验中在车辆前方利用障碍物模拟目标车位置,成功激活了毫米波雷达系统相关模块功能,使车辆显示屏上出现了前方车辆影像。为全面考核毫米波雷达系统的电磁抗扰能力,将发射天线正对车辆前方和右侧进行测试。
4.2 测试结果分析
分别对车辆施加 30 V/m、45 V/m、60 V/m、90 V/m及 100 V/m 场强的抗扰信号,观察车辆在 20~2000 MHz 频段内抗扰性能,并记录车辆现象,车辆异常现象如表 1 所示。
表 1 车辆异常现象
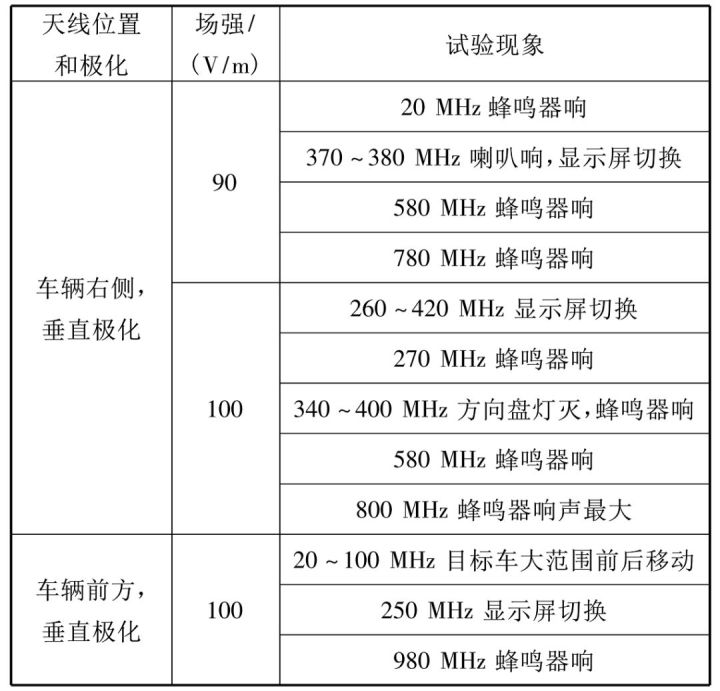
从表 1 中可以看出,在多数测试条件下,车辆出现了蜂鸣器响、显示屏切换等故障现象,这些现象虽然对车辆的安全性影响较小,但会降低产品的电磁兼容性品质,引起较大的客户抱怨。
此外,在车辆前方进行 100 V/m 垂直极化场的毫米波雷达系统抗扰测试时,车辆在 20~100 MHz 频段内出现了目标车大范围前后移动的情况,这种情况可能会导致 ADAS 控制器的误判,造成 ACC、AEB、FCW 等功能执行模块的异常操作,严重威胁车辆的行驶安全。
毫米波雷达系统抗扰试验测试结果显示,在一定强度的场强下,电磁信号会干扰毫米波雷达系统,影响系统及车辆功能。
现实环境中,在短波电台、大型基站等附近均存在类似等级的场强,对智能车辆的安全行驶构成了影响。在这种情况下,进行毫米波雷达系统的抗扰测试,对于企业评估产品性能具有重要意义。



 广告
广告 



最新资讯
-
东扬精测|CLNB 2026 苏州|世界顶尖的测试
2026-04-03 09:48
-
EA-BIM 20005多通道电池阻抗测试仪如何赋能
2026-04-03 09:46
-
自动泊车测试进入厘米级时代——从最新测试
2026-04-03 09:10
-
真正决定城市体验的,不是硬件,而是控制系
2026-04-02 14:26
-
LabVIEW传奇工程师亲临现场,NI测试测量技
2026-04-02 14:24
