




 广告
广告





















































AR-HUD现状与趋势
2021-03-19 00:29:19· 来源:佐思汽车研究 作者:周彦武

大众ID.3/ID.4与最近的奥迪Q4都采用了AR-HUD,AR-HUD成为汽车电子的热门话题,几乎所有的新车都规划使用AR-HUD。奥迪A7的HUD上图为奥迪A7上的HUD爆炸图,由大陆
大众ID.3/ID.4与最近的奥迪Q4都采用了AR-HUD,AR-HUD成为汽车电子的热门话题,几乎所有的新车都规划使用AR-HUD。
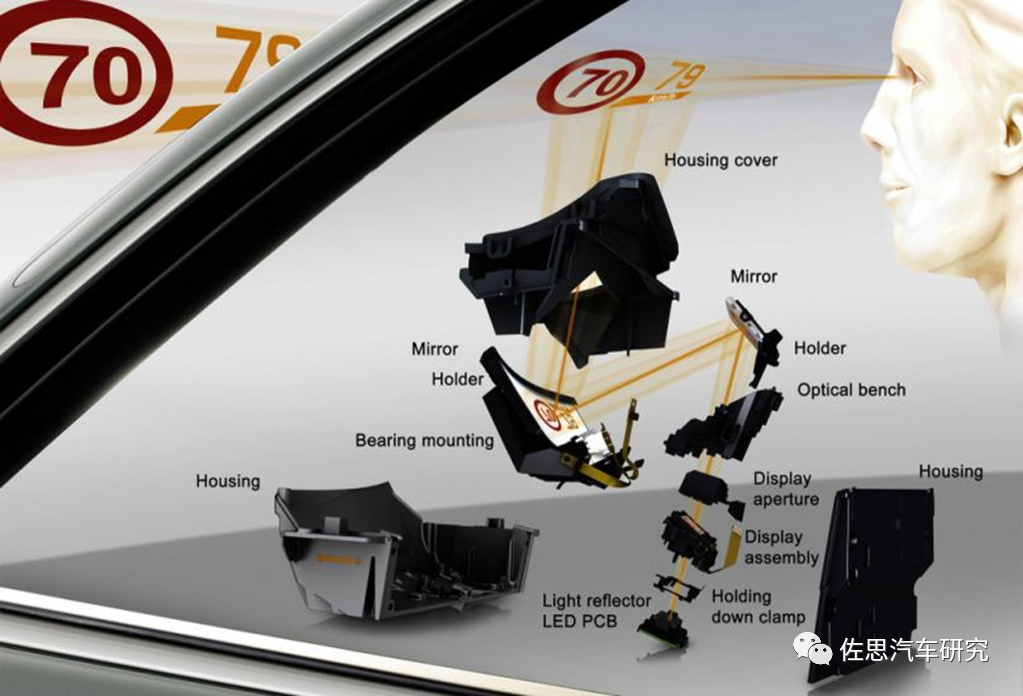
奥迪A7的HUD
上图为奥迪A7上的HUD爆炸图,由大陆汽车提供。VID为2.2米,HFOV为6度,VFOV为2度,分辨率为864*480 。成本结构方面,对TFT型HUD来说PGU、光机与结构、PCBA与LED各占1/3。
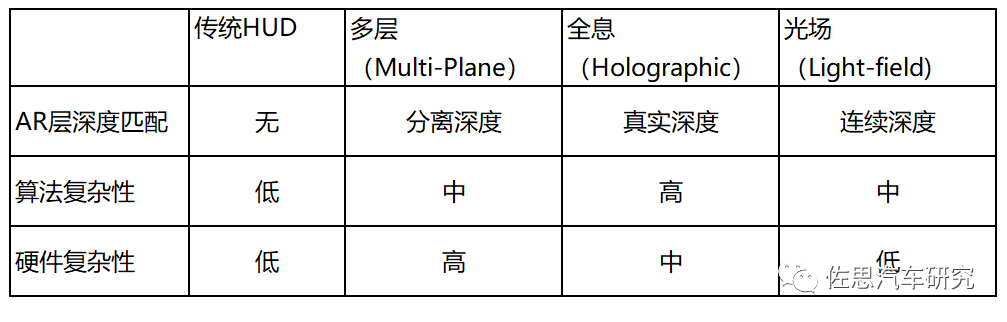
按照图像生成单元(即PGU)常见的HUD分为TFT、DLP和激光三大类,也有冷门的很少人提及的LCOS。按光源可以分为LED和激光两大类,按投影成像技术可以分为多片、全息和光场三大类。所谓AR-HUD实际就是增加了AR图像层(也有把层说成焦段),在常规车辆信息如速度和能耗外增加了导航和ADAS信息。
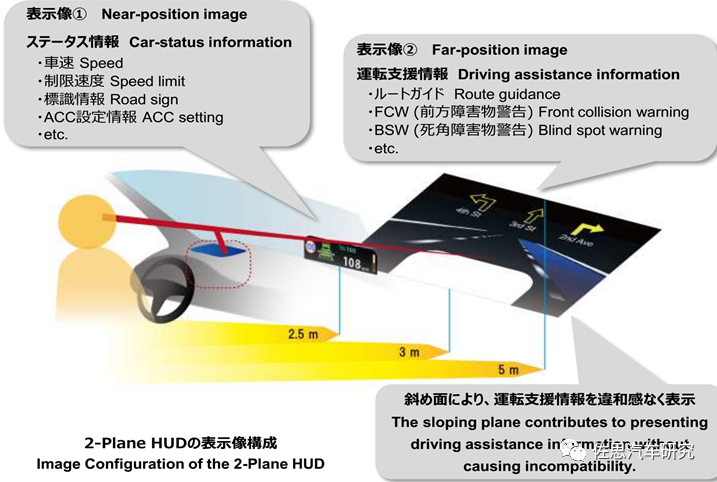
日本精机多层图像HUD
上图是全球第一大HUD厂家日本精机的多层图像HUD设计。近层图像主要显示仪表和设置调整信息,远场图像显示路径导航和各种警告信息。还有一个侧方立体信息,如盲点和车道偏离警告。通常只是增加一个远场AR图像层,其虚拟成像距离VID一般是5到10米,常规图像层的VID是2米。
目前主流是多层。多层又可分为单PGU与多PGU两种。
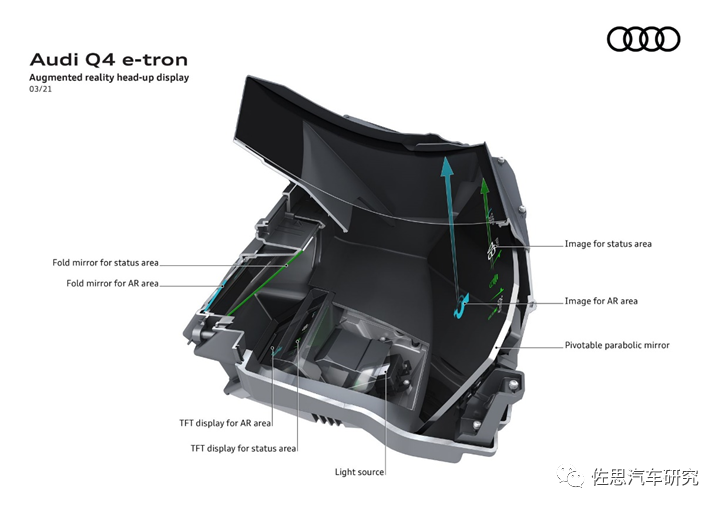
奥迪A4的AR HUD
上图为奥迪A4的AR HUD,应该是两个PGU,一个是静态图像层,即常规车辆信息。另一个是AR图像层。光机部分也基本是两套,可以说这是两套普通HUD放在一个盒子里,成本高且复杂。

静态图像层3米的VID,AR图像层10米的VID。
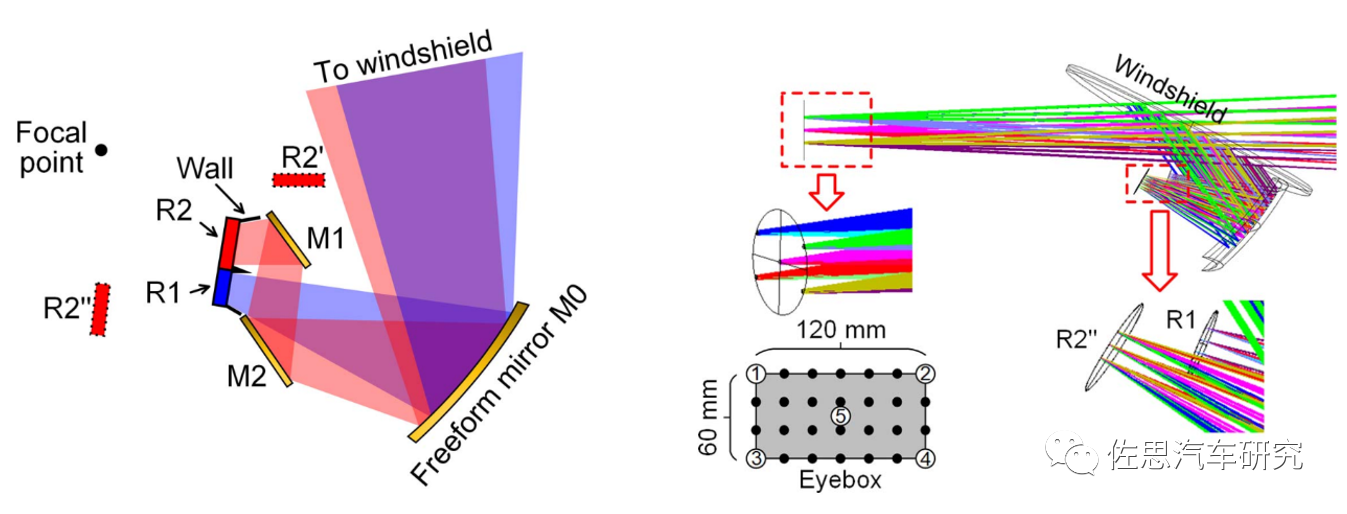
也有台湾国立交通大学设计的单PGU型AR HUD,它将PGU的图像分为两个逻辑区域R1和R2,实现一个PGU,两层图像。

一个PGU两层图像的AR-HUD简单参数。
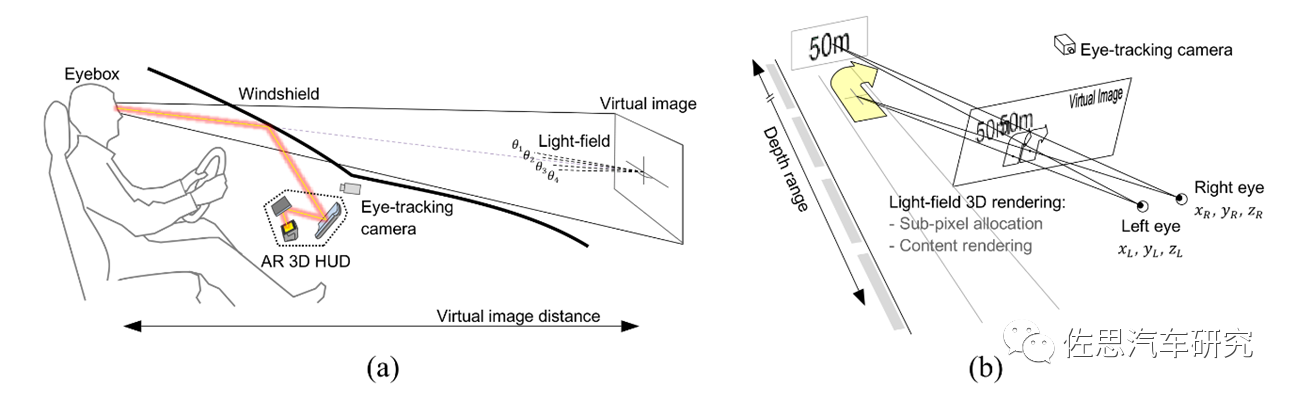
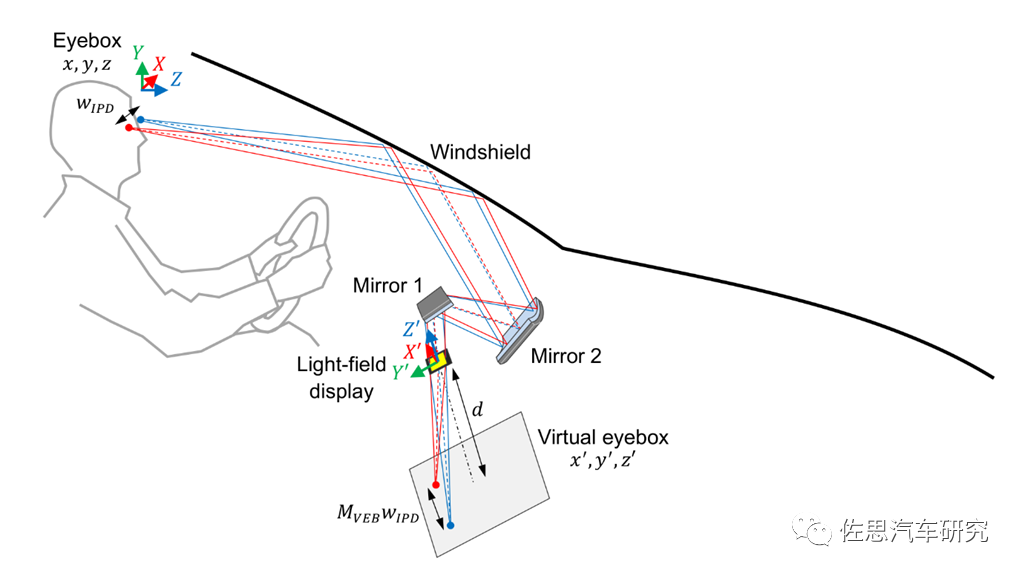
三星电子的光场型AR-HUD
光场型AR-HUD的缺点是需要一个眼球追踪摄像头追踪眼球的位置,通常是立体双目摄像头,典型如奔驰S级的,也有TOF摄像头,理论上完全可行,但还未见到量产产品。
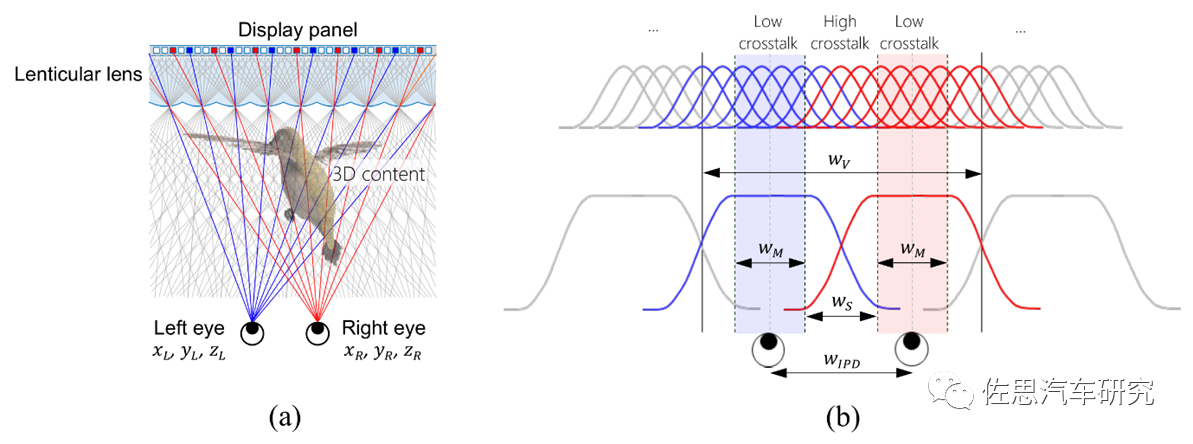
三星电子的光场型AR-HUD的核心是Lenticular透镜。
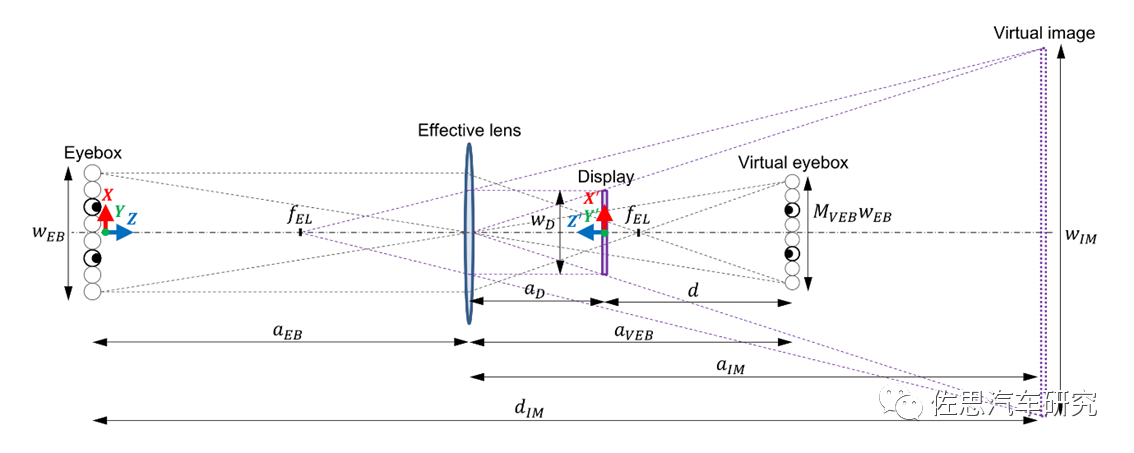
三星电子光场型AR-HUD透镜模型。
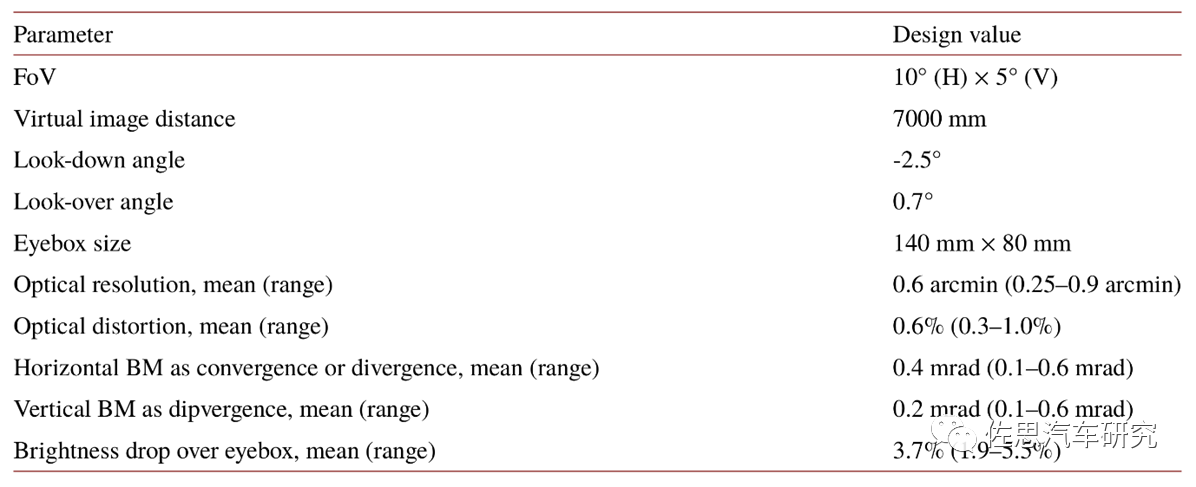 上表是三星电子光场型AR-HUD的参数,未来三星哈曼将量产这种AR-HUD。
上表是三星电子光场型AR-HUD的参数,未来三星哈曼将量产这种AR-HUD。
全息技术方面,有多种技术组合,异常复杂,简单地说有两种,一种是光波导,一种是LCOS-SLM,LCOS-SLM通常都结合激光HUD使用,下文在介绍激光HUD时会介绍。
波导技术并不是什么新发明,我们熟悉的光通信系统中,用来传输信号的光纤组成了无数条连接大洋彼岸的海底光缆,就是波导的一种,只不过传输的是我们看不见的红外波段的光。在AR-HUD中,要想光在传输的过程中无损失无泄漏,“全反射”是关键,即光在波导中像只游蛇一样通过来回反射前进而并不会透射出来。简单来说达到全反射需要满足两个条件:(1)传输介质即波导材料需要具备比周围介质高的折射率;(2)光进入波导的入射角需要大于临界角θc。光机完成成像过程后,波导将光耦合进自己的玻璃基底中,通过“全反射”原理将光传输到眼睛前方再释放出来。这个过程中波导只负责传输图像,一般情况下不对图像本身做任何“功”(比如放大缩小等),可以理解为“平行光进,平行光出”,所以它是独立于成像系统而存在的一个单独元件。光波导总体上可以分为几何光波导(Geometric Waveguide)和衍射光波导(DiffractiveWaveguide)两种,几何光波导就是所谓的阵列光波导,其通过阵列反射镜堆叠实现图像的输出和动眼框的扩大,代表光学公司是以色列的Lumus,目前市场上还未出现大规模的量产眼镜产品。衍射光波导主要有利用光刻技术制造的表面浮雕光栅波导(Surface Relief Grating)和基于全息干涉技术制造的全息体光栅波导VHG (Volumetric Holographic Grating)或HOE (Holographicoptical Element), HoloLens 2,MagicLeap One均属于前者,全息体光栅光波导则是使用全息体光栅元件代替浮雕光栅,苹果公司收购的Akonia公司采用的便是全息体光栅,另外致力于这个方向的还有DigiLens(HOE)。德国大陆汽车向 DigiLens投资了2500万美元,目前持有该公司股份接近18%,并保有董事会席位。DigiLens的其他一些投资者还包括Universal Display Corporation、Samsung Venture Investment、Niantic、Sony Innovation Fund、Diamond Edge Ventures和Mitsubishi Chemical Holdings Corporation等。
PGU方面,目前主要是TFT-LCD,虽然德州仪器一再宣称DLP才是AR-HUD的首选,但高昂的价格让人望而却步,未来恐怕TFT-LCD还是主流。还有冷门的LCOS,在谷歌AR眼镜上有使用,由台湾群创关联公司奇景提供,不过AR眼镜无一例外都失败了,未来消费级的AR眼镜恐永远不可能出现,一天到晚看短视频的中国人绝对不喜欢这玩意。
TFT-LCD的PGU的主要供应商是日本JDI和京瓷,松下能够自产PGU,这也是松下HUD快速崛起的主要原因。台湾的友达和群创也有,国内的天马和京东方也有TFT-LCD的PGU。日本JDI和京瓷的PGU市场占有率估计超过80%甚至更高,因为日本企业电装、松下、日本精机三家在HUD的市场占有率有60%左右。
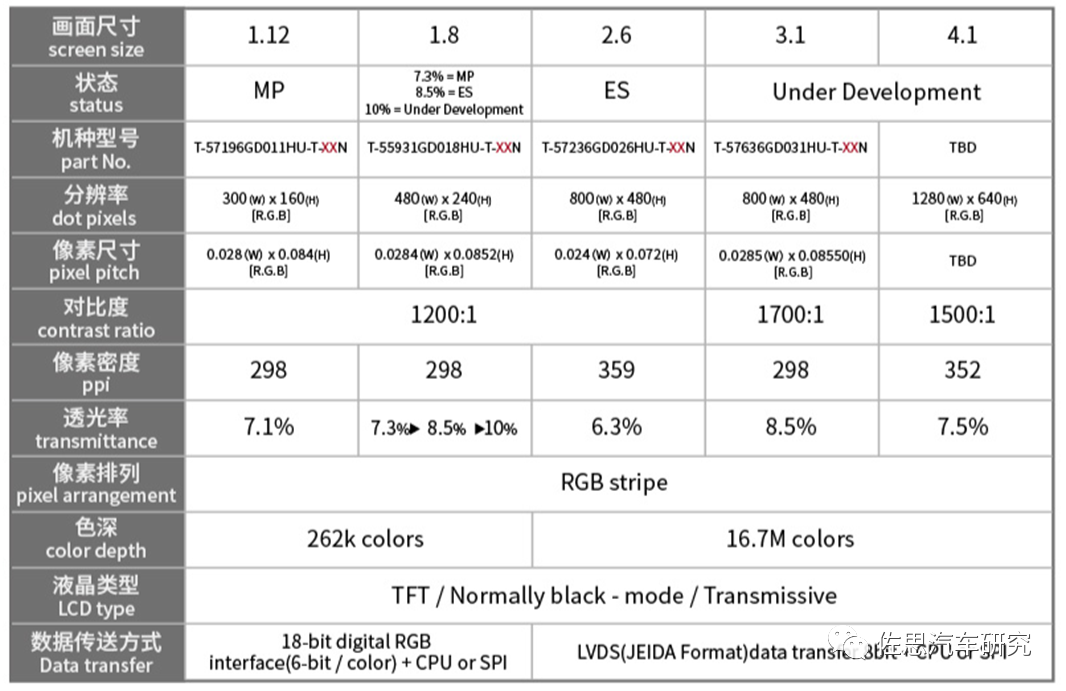
京瓷PGU
京瓷PGU一览见上表,目前3.1英寸已经量产,4.1英寸也完成了研发。目前主流PGU为3.1英寸,AR-HUD至少也要3.1英寸,非AR-HUD考虑成本有用1.8甚至1.1英寸的。
DLP方面,奔驰新S级对成本不敏感,自然采用了DLP做AR HUD,不过使用DLP技术做HUD,奔驰并非第一家,林肯大陆和领航员也都使用了DLP做HUD,但仍然是传统HUD,都由德国大陆汽车提供。林肯大陆和领航员使用的是德州仪器早期DMD芯片DLP3030,只有40万像素。奔驰AR HUD使用德州仪器最新的DMD芯片DLP5531(2018年下半年才量产,所以林肯没用上),有130万像素,FOV为10X5°,VID距离为33英尺即10米,奔驰称这相当于77英寸显示器。不仅在HUD上使用了DLP投影,在车大灯上,奔驰还极尽奢华使用了DLP投影,也是DLP5531。

奔驰S级AR-HUD
德州仪器的DLP PGU也就是DMD,目前主推的是DLP3030-Q1,分辨率和TFT型PGU一样,也是864*480,性能并不算突出,因此市场一直受限,高端产品则有DLP5531-Q1,分辨率1280*720,还有一款2020年9月推出的DLP5530-Q1,外接GPU和钻石预处理分辨率可达2304*1152,德州仪器雄心勃勃,试图用DLP5530-Q1打造IP HOE挡风玻璃全息仪表,完全取代传统仪表,我下一篇文章会详细说明。
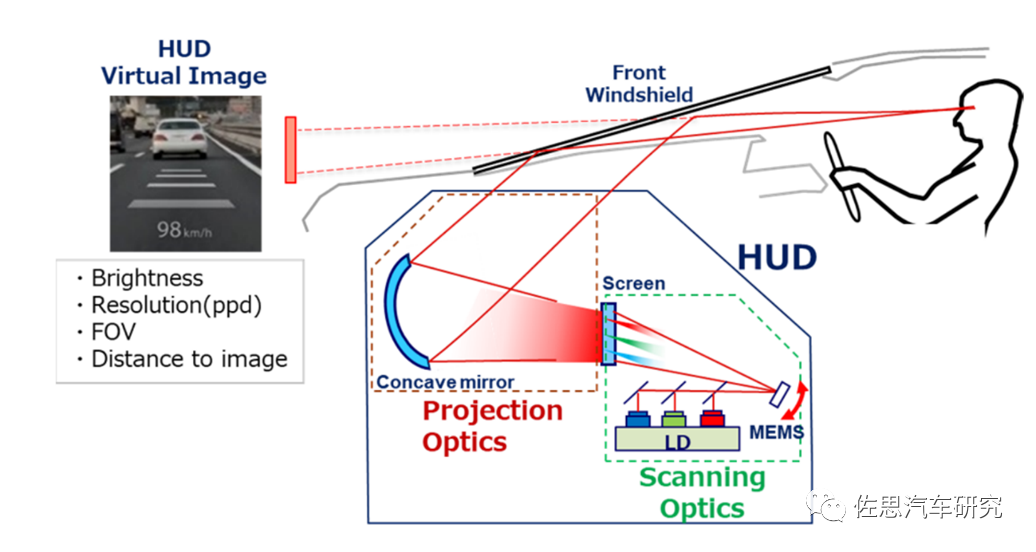
理光激光HUD
激光HUD是性能最强劲的,或许是自动驾驶时代的标配,需要注意这里的激光不是指光源,而是成像单元。简单地说,这很像一个MEMS激光雷达,RGB三色激光二极管编译图像成激光,用一个二轴扫描MEMS镜扫描成像。
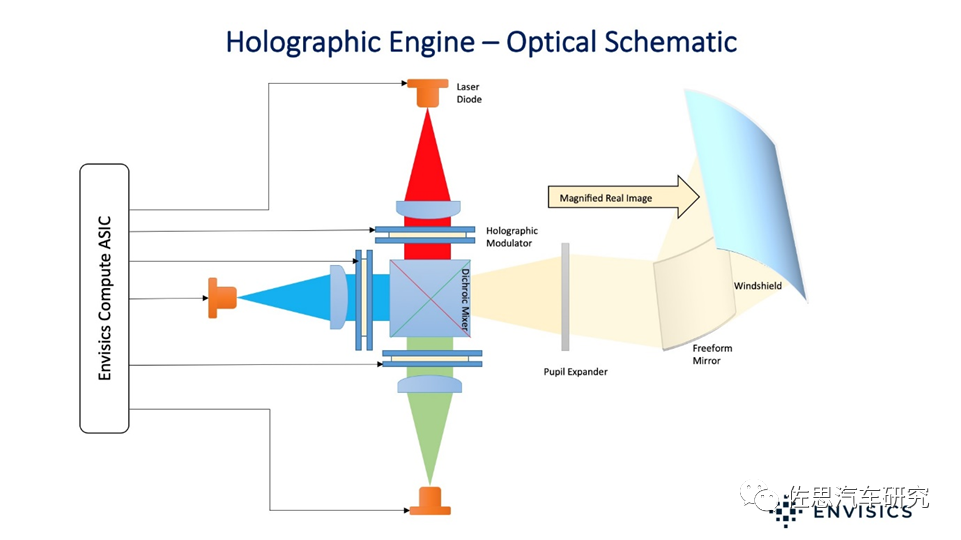
Envisics全息激光HUD
跟激光雷达一样,有MEMS的就有OPA的,不过在全息图像领域叫LC-SLM,即液晶空间光调制,涉足到LC-SLM研发的国外企业包括美国Meadowlark、日本Hamamatsu、德国Holoeye等;国内的厂家以上海UPOLabs为代表,初创企业Envisics也异常活跃,上图就是Envisics的全息激光HUD示意图。2020年10月,车载全息AR-HUD供应商Envisics获得了由通用资本、上汽资本、现代摩比斯和Van Tuyl Companies牵头的B轮融资,金额为5000万美元。摩比斯计划与Envisics一起开发自动驾驶专用的AR-HUD,并计划到2025年实现量产。
何为空间光调制器(Spatial Light Modulator)?广义的空间光调制器是指一种新型的光波特性变换/调制器件;进一步而言,是一种可编程、可使光波在时间及空间上动态改变特性的器件;空间光调制器是一种将输入光波信号根据控制信号按某种函数关系调制输出光信号的器件。因此,用数学函数来表达的话,可如下:
Output(O)=C(x,y,t)*Input(O)
C(x,y,t)为控制信号;Input(O)为输入光信号,Output(O)为输出光信号,输入与输出光信号的变化可以是光波振幅、相位、偏振态、波长、相干性等属性参数中的一个或多个参数值,这些参数的变化能引起光波特征的各种变换。Input和Output之间不同变换意味着SLM实现了不同的功能。输入光和输出光的读出方式不同,意味着不同的光路形式,主要有透射式和反射式。运算量巨大,不过可不是深度学习那种单纯的MAC乘和累加,而是类似毫米波雷达那种空间时域变换的FFT计算。运算量大是其主要缺点。
传统HUD技术通常在微型显示屏上生成图像,然后投影到固定的焦点平面上,这种技术光损率太高,在光线传播过程中通常会浪费90%光源,不仅功耗更高而且发热量还会大一些。激光HUD是将图像直接生成在挡风玻璃上,而不是PGU里。因此激光HUD具备无与伦比的性能和效率优势。比如FOV,顶级AR-HUD的FOV仅10X5°,而激光HUD可以达到180度。对比度和亮度方面,激光更是具备压倒性的优势,分辨率方面,可以做到4K级的分辨率,DLP或TFT要做到的话,成本会高出激光不少。光机引擎方面,采用MEMS扫描的光机引擎体积非常小,远低于DLP或TFT-LCD。捷豹路虎(就是Envisics供应的)和日本先锋在2014年曾经推出过激光HUD,限于当时的技术条件,AR全息技术当时远未达实用地步,传统HUD完全无法发挥激光HUD的优势。如今AR全息已经成熟。激光HUD差不多是公认的未来方向。日本企业尤其积极,矢崎、ALPS阿尔派、松下、瑞萨、理光、先锋、电装都有不少激光HUD专利和相关产品。其最大缺点是成本太高,当然了,成本是可以降低的。还有一个缺点是激光二极管发热量大,可能需要水冷。
激光AR-HUD可以显示异常丰富的内容,分辨率足够高,视觉效果非常好,自动驾驶时代尤其适合,能够为人们提供足够的自动驾驶使用信心。

松下在2021年CES大展上与Envisics合作的激光全息HUD
总结一下,长时间内TFT-LCD型AR-HUD恐怕都是主流,未来可能从两个PGU缩成一个,成本更低,竞争力更强。DLP曲高和寡,只能在顶级豪华车上看到,恐怕奔驰E级都不可能使用。激光HUD是未来发展方向,但恐怕只用在L3级以上自动驾驶车辆上。
奥迪A7的HUD
上图为奥迪A7上的HUD爆炸图,由大陆汽车提供。VID为2.2米,HFOV为6度,VFOV为2度,分辨率为864*480 。成本结构方面,对TFT型HUD来说PGU、光机与结构、PCBA与LED各占1/3。
按照图像生成单元(即PGU)常见的HUD分为TFT、DLP和激光三大类,也有冷门的很少人提及的LCOS。按光源可以分为LED和激光两大类,按投影成像技术可以分为多片、全息和光场三大类。所谓AR-HUD实际就是增加了AR图像层(也有把层说成焦段),在常规车辆信息如速度和能耗外增加了导航和ADAS信息。
日本精机多层图像HUD
上图是全球第一大HUD厂家日本精机的多层图像HUD设计。近层图像主要显示仪表和设置调整信息,远场图像显示路径导航和各种警告信息。还有一个侧方立体信息,如盲点和车道偏离警告。通常只是增加一个远场AR图像层,其虚拟成像距离VID一般是5到10米,常规图像层的VID是2米。
目前主流是多层。多层又可分为单PGU与多PGU两种。
奥迪A4的AR HUD
上图为奥迪A4的AR HUD,应该是两个PGU,一个是静态图像层,即常规车辆信息。另一个是AR图像层。光机部分也基本是两套,可以说这是两套普通HUD放在一个盒子里,成本高且复杂。
静态图像层3米的VID,AR图像层10米的VID。
也有台湾国立交通大学设计的单PGU型AR HUD,它将PGU的图像分为两个逻辑区域R1和R2,实现一个PGU,两层图像。
一个PGU两层图像的AR-HUD简单参数。
三星电子的光场型AR-HUD
光场型AR-HUD的缺点是需要一个眼球追踪摄像头追踪眼球的位置,通常是立体双目摄像头,典型如奔驰S级的,也有TOF摄像头,理论上完全可行,但还未见到量产产品。
三星电子的光场型AR-HUD的核心是Lenticular透镜。
三星电子光场型AR-HUD透镜模型。
上表是三星电子光场型AR-HUD的参数,未来三星哈曼将量产这种AR-HUD。全息技术方面,有多种技术组合,异常复杂,简单地说有两种,一种是光波导,一种是LCOS-SLM,LCOS-SLM通常都结合激光HUD使用,下文在介绍激光HUD时会介绍。
波导技术并不是什么新发明,我们熟悉的光通信系统中,用来传输信号的光纤组成了无数条连接大洋彼岸的海底光缆,就是波导的一种,只不过传输的是我们看不见的红外波段的光。在AR-HUD中,要想光在传输的过程中无损失无泄漏,“全反射”是关键,即光在波导中像只游蛇一样通过来回反射前进而并不会透射出来。简单来说达到全反射需要满足两个条件:(1)传输介质即波导材料需要具备比周围介质高的折射率;(2)光进入波导的入射角需要大于临界角θc。光机完成成像过程后,波导将光耦合进自己的玻璃基底中,通过“全反射”原理将光传输到眼睛前方再释放出来。这个过程中波导只负责传输图像,一般情况下不对图像本身做任何“功”(比如放大缩小等),可以理解为“平行光进,平行光出”,所以它是独立于成像系统而存在的一个单独元件。光波导总体上可以分为几何光波导(Geometric Waveguide)和衍射光波导(DiffractiveWaveguide)两种,几何光波导就是所谓的阵列光波导,其通过阵列反射镜堆叠实现图像的输出和动眼框的扩大,代表光学公司是以色列的Lumus,目前市场上还未出现大规模的量产眼镜产品。衍射光波导主要有利用光刻技术制造的表面浮雕光栅波导(Surface Relief Grating)和基于全息干涉技术制造的全息体光栅波导VHG (Volumetric Holographic Grating)或HOE (Holographicoptical Element), HoloLens 2,MagicLeap One均属于前者,全息体光栅光波导则是使用全息体光栅元件代替浮雕光栅,苹果公司收购的Akonia公司采用的便是全息体光栅,另外致力于这个方向的还有DigiLens(HOE)。德国大陆汽车向 DigiLens投资了2500万美元,目前持有该公司股份接近18%,并保有董事会席位。DigiLens的其他一些投资者还包括Universal Display Corporation、Samsung Venture Investment、Niantic、Sony Innovation Fund、Diamond Edge Ventures和Mitsubishi Chemical Holdings Corporation等。
PGU方面,目前主要是TFT-LCD,虽然德州仪器一再宣称DLP才是AR-HUD的首选,但高昂的价格让人望而却步,未来恐怕TFT-LCD还是主流。还有冷门的LCOS,在谷歌AR眼镜上有使用,由台湾群创关联公司奇景提供,不过AR眼镜无一例外都失败了,未来消费级的AR眼镜恐永远不可能出现,一天到晚看短视频的中国人绝对不喜欢这玩意。
TFT-LCD的PGU的主要供应商是日本JDI和京瓷,松下能够自产PGU,这也是松下HUD快速崛起的主要原因。台湾的友达和群创也有,国内的天马和京东方也有TFT-LCD的PGU。日本JDI和京瓷的PGU市场占有率估计超过80%甚至更高,因为日本企业电装、松下、日本精机三家在HUD的市场占有率有60%左右。
京瓷PGU
京瓷PGU一览见上表,目前3.1英寸已经量产,4.1英寸也完成了研发。目前主流PGU为3.1英寸,AR-HUD至少也要3.1英寸,非AR-HUD考虑成本有用1.8甚至1.1英寸的。
DLP方面,奔驰新S级对成本不敏感,自然采用了DLP做AR HUD,不过使用DLP技术做HUD,奔驰并非第一家,林肯大陆和领航员也都使用了DLP做HUD,但仍然是传统HUD,都由德国大陆汽车提供。林肯大陆和领航员使用的是德州仪器早期DMD芯片DLP3030,只有40万像素。奔驰AR HUD使用德州仪器最新的DMD芯片DLP5531(2018年下半年才量产,所以林肯没用上),有130万像素,FOV为10X5°,VID距离为33英尺即10米,奔驰称这相当于77英寸显示器。不仅在HUD上使用了DLP投影,在车大灯上,奔驰还极尽奢华使用了DLP投影,也是DLP5531。
奔驰S级AR-HUD
德州仪器的DLP PGU也就是DMD,目前主推的是DLP3030-Q1,分辨率和TFT型PGU一样,也是864*480,性能并不算突出,因此市场一直受限,高端产品则有DLP5531-Q1,分辨率1280*720,还有一款2020年9月推出的DLP5530-Q1,外接GPU和钻石预处理分辨率可达2304*1152,德州仪器雄心勃勃,试图用DLP5530-Q1打造IP HOE挡风玻璃全息仪表,完全取代传统仪表,我下一篇文章会详细说明。
理光激光HUD
激光HUD是性能最强劲的,或许是自动驾驶时代的标配,需要注意这里的激光不是指光源,而是成像单元。简单地说,这很像一个MEMS激光雷达,RGB三色激光二极管编译图像成激光,用一个二轴扫描MEMS镜扫描成像。
Envisics全息激光HUD
跟激光雷达一样,有MEMS的就有OPA的,不过在全息图像领域叫LC-SLM,即液晶空间光调制,涉足到LC-SLM研发的国外企业包括美国Meadowlark、日本Hamamatsu、德国Holoeye等;国内的厂家以上海UPOLabs为代表,初创企业Envisics也异常活跃,上图就是Envisics的全息激光HUD示意图。2020年10月,车载全息AR-HUD供应商Envisics获得了由通用资本、上汽资本、现代摩比斯和Van Tuyl Companies牵头的B轮融资,金额为5000万美元。摩比斯计划与Envisics一起开发自动驾驶专用的AR-HUD,并计划到2025年实现量产。
何为空间光调制器(Spatial Light Modulator)?广义的空间光调制器是指一种新型的光波特性变换/调制器件;进一步而言,是一种可编程、可使光波在时间及空间上动态改变特性的器件;空间光调制器是一种将输入光波信号根据控制信号按某种函数关系调制输出光信号的器件。因此,用数学函数来表达的话,可如下:
Output(O)=C(x,y,t)*Input(O)
C(x,y,t)为控制信号;Input(O)为输入光信号,Output(O)为输出光信号,输入与输出光信号的变化可以是光波振幅、相位、偏振态、波长、相干性等属性参数中的一个或多个参数值,这些参数的变化能引起光波特征的各种变换。Input和Output之间不同变换意味着SLM实现了不同的功能。输入光和输出光的读出方式不同,意味着不同的光路形式,主要有透射式和反射式。运算量巨大,不过可不是深度学习那种单纯的MAC乘和累加,而是类似毫米波雷达那种空间时域变换的FFT计算。运算量大是其主要缺点。
传统HUD技术通常在微型显示屏上生成图像,然后投影到固定的焦点平面上,这种技术光损率太高,在光线传播过程中通常会浪费90%光源,不仅功耗更高而且发热量还会大一些。激光HUD是将图像直接生成在挡风玻璃上,而不是PGU里。因此激光HUD具备无与伦比的性能和效率优势。比如FOV,顶级AR-HUD的FOV仅10X5°,而激光HUD可以达到180度。对比度和亮度方面,激光更是具备压倒性的优势,分辨率方面,可以做到4K级的分辨率,DLP或TFT要做到的话,成本会高出激光不少。光机引擎方面,采用MEMS扫描的光机引擎体积非常小,远低于DLP或TFT-LCD。捷豹路虎(就是Envisics供应的)和日本先锋在2014年曾经推出过激光HUD,限于当时的技术条件,AR全息技术当时远未达实用地步,传统HUD完全无法发挥激光HUD的优势。如今AR全息已经成熟。激光HUD差不多是公认的未来方向。日本企业尤其积极,矢崎、ALPS阿尔派、松下、瑞萨、理光、先锋、电装都有不少激光HUD专利和相关产品。其最大缺点是成本太高,当然了,成本是可以降低的。还有一个缺点是激光二极管发热量大,可能需要水冷。
激光AR-HUD可以显示异常丰富的内容,分辨率足够高,视觉效果非常好,自动驾驶时代尤其适合,能够为人们提供足够的自动驾驶使用信心。
松下在2021年CES大展上与Envisics合作的激光全息HUD
总结一下,长时间内TFT-LCD型AR-HUD恐怕都是主流,未来可能从两个PGU缩成一个,成本更低,竞争力更强。DLP曲高和寡,只能在顶级豪华车上看到,恐怕奔驰E级都不可能使用。激光HUD是未来发展方向,但恐怕只用在L3级以上自动驾驶车辆上。



 广告
广告 编辑推荐




最新资讯
-
用于赛车运动车辆动力学测量的光学传感器
2026-03-18 21:31
-
联合国法规R86对农林拖拉机灯光安装的工程
2026-03-18 12:20
-
联合国法规R78对L类车辆制动系统的工程化约
2026-03-18 12:16
-
联合国法规R77对机动车驻车灯静态可见性的
2026-03-18 12:16
-
TCT亚洲展启幕!思看科技人气爆棚,这些产
2026-03-17 19:17
