




 广告
广告





















































Simcenter 3D车辆机电实时仿真
2020-01-17 16:46:33· 来源:Simcenter 3D Online 作者:曹小佳

在车辆的开发早期,物理样机还没有制造出来,实时仿真技术的应用在获取车辆性能方面起到了举足轻重的作用,典型的应用是硬件在环测试和驾驶模拟器。在实时仿真的
在车辆的开发早期,物理样机还没有制造出来,实时仿真技术的应用在获取车辆性能方面起到了举足轻重的作用,典型的应用是硬件在环测试和驾驶模拟器。在实时仿真的过程中,需要建立一个数字仿真模型来和物理系统进行输入输出数据交互,在这个过程中不能因仿真求解而产生数据交互延迟,该物理系统可以是控制器和实际驾驶员。在过去已有的一些实时方案中,该数字仿真模型大多基于简化模型,这样一来就无法使用虚拟模型来精确的预测实际复杂系统的效果。通过Simcenter3D Motion实时仿真,客户可以实时地求解详细的高精度的多体模型,并为硬件在环测试与驾驶模拟器直接并实时地输出所需的数据。由于Simcenter3D Motion强大的联合仿真能力,Motion可以与车辆子系统1D仿真模型进行联合,以更大程度的增加实时仿真的精度等级。
概要
数字虚拟模型在车辆的开发流程中发挥着越来越重要的作用,多体动力学仿真已经是用于汽车工业设计流程中的标准方法和手段,高精度的动力学模型可以得到车辆动力学所有的关键特性。为了保证车辆性能和安全,使用了高级行驶辅助系统(ADAS),车辆变成了越来越复杂的机电耦合系统。对于复杂的机电系统,通常是结合车辆物理样机试验来对其进行设计、验证以及优化。然而,试验测试必然价格昂贵、耗时,并且无法对机电系统进行快速的修改,更重要的是,试验测试需要真实的车辆物理样机,而物理样机要在开发流程的后期才能制造出来,这个时候几乎没有时间对机电系统进行设计方案细致地评估优化。另外,完整的耦合复杂机电系统的车辆虚拟样机模型在实际中往往不可行,因为它需要控制器的有效数值模型。而由于ADAS控制系统通常由一级零部件供应商提供,出于对知识产权的保护,系统里面的控制算法不会完全提供给汽车主机厂。
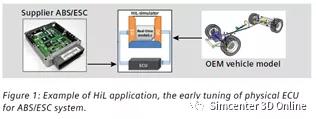
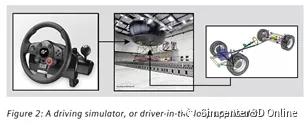
要获取ADAS与机械系统的精确相互作用性能,最有效的方法就是使用硬件在环。目前,硬件在环测试已经成为多数商用车辆主机厂以及零部件供应商进行ECU校验的实用标准。使用硬件在环,可以通过传感器和作动器(如图1、2所示)在机械系统的数字模型和控制器的硬件之间产生相互作用,这就意味着数字模型要实时的提供仿真结果。在正常运行状态下,硬件控制器以一定的通讯率从传感器中获取车辆状态信息。1ms的通讯间隔已经成为汽车应用中的行业标准。因此,为了模拟控制器的工作条件,数字模型应在相同的1ms的通讯间隔中提供精确的仿真结果以考虑控制器对车辆响应的作用效果。
实时仿真现状
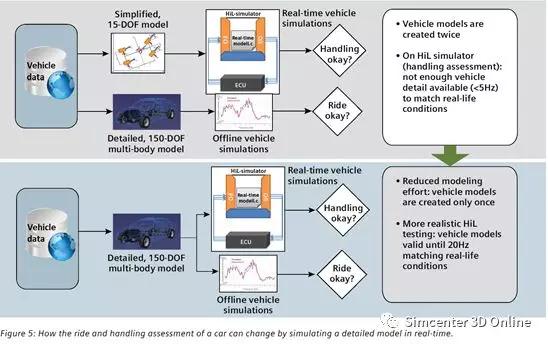
高精度模型在机械系统中的典型应用是用于离线分析。为了获得精确的仿真结果,多自由度的模拟方案往往是必须的。例如,用于预测弹塑性运动学特性的汽车悬架模型往往需要包含像部件之间衬套力单元的非线性柔性建模。由于其高复杂性,绝大多数高精度模型因此很容易就达到150个以上的自由度,这给绝大多数多体系统动力学求解器带来巨大的性能挑战。对于这样的现状,目前的行业惯例是使用高性能多体系统模型的简化版来用于控制系统的设计与验证,驾驶模拟器也一样。典型的模型简化就是去除部件以及自由度,直到模型的复杂程度能用于实时仿真。对于悬架,CAE分析往往使用简化的运动副代替柔性连接,甚至用复杂查表方式来代替弹塑性运动学特性曲线。这些曲线包括在车轮在大位移(车轮垂向运动、转向角度)以及车轮载荷(纵向、侧向以及回正力矩)驱动下的位置与方向。通过这些简化,可以得到一个典型具有15到20个自由度的车辆行驶动力学模型(如图3所示)。
相对高精度的复杂模型,低精度的简化模型只需要较低的求解工作量,因此只能达到较低的求解精度。低精度简化模型只能提供可接受的约在5Hz以内仿真精度,在整车性能分析中只能覆盖典型的横摆、纵倾以及起伏模式(roll, pitch and heave modes)。高精度复杂模型可以将有效频段范围扩展到约30Hz。这个频率范围内能包含悬架的衬套有限刚度的动力学效应以及ADAS,ADAS在这样的动力学效应下会产生不一样的响应。在这种情况下,为了及时地发现和处理这类问题,高精度复杂车辆动力学模型的硬件在环测试时必需的。
在运行实时仿真时简化多体模型会有以下三个主要副作用:
- 精度的损失:
因模型简化导致实时仿真结果精度下降;
- 参数的损失:
在多体模型中失去绝大部分参数,比如悬架几何和衬套刚度在实时仿真中变得不可用。因此,离线模型中的任何修改需要做简化处理。
- 额外的工作:
针对同一车辆,针对离线仿真和实时仿真,需要建立和管理不同模型(一个用于离线的高精度复杂模型,一个用于实时的低精度简化模型),这需要额外的工作。
实时应用的突破性解决方案
Simcenter 3D Motion 软件的实时求解平台,支持客户在实时仿真中能够直接使用高性能复杂多体系统模型。该解决方案的明显优势如下:
- 相同的高性能复杂模型,同时适用于离线仿真和实时仿真;
- 从离线仿真到实时仿真不会损失精度;
- 可以在实时仿真的模型中直接获取物理参数从而轻易实现“what-if”分析。
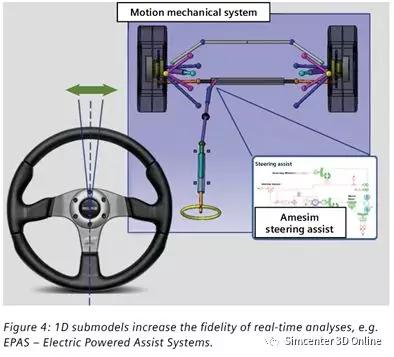
此外,通过motion与Amesim的紧密集成(如图4所示),可以建立复杂子系统的1D详细模型,比如电液压组件以及控制逻辑,并将该1D模型加到3D模型中进行整个机电系统的精确实时仿真。
Simcenter3D Motion实时求解特点
Simcenter 3D Motion实时求解主要特点包括定步长隐式求解、并行求解以及耦合电、液、气等子系统三个主要特点:
定步长隐式求解
在硬件在环仿真中,众所周知,任何一个时间步的周转时间(用来计算下一个离散时间点系统状态所需的时间)必须小于仿真时间步。换句话说,实时仿真必须是通过定步长来求解进行。
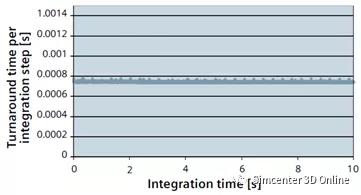
Figure6
当前大多数实时求解都是显式的。这类求解只通过考虑当前(也有可能是过去)离散时间点的加速度来计算下一个时间步的系统状态。虽然显示方法可以保证确定性的计算载荷,但是内含的像衬套之类的柔性单元会产生数值刚度系统,在这种情况下,隐式求解法被认为是比较好的,因为其优秀的数值稳定性和精度。
隐式方法为了确保加速度在下一个离散时间点满足模型的非线性代数微分方程(DAEs),需要以不可预知的迭代次数来达到收敛求解。此外,在离线多体仿真中,为了在最优的时间步长上满足数值模型,积分方法的步长也是改变的。
总之,标准隐式求解器不是确定性的变步长求解,它们在每一个时间步上花费的处理时间不一样,这样就导致这类求解器不适合实时仿真。为了实时的传送仿真结果,隐式时间积分方法需要是确定性的,即定步长求解。Simcenter3D Motion实时求解器是确定性的定步长隐式求解,它通过限制迭代的次数以及固定时间积分的顺序,从而使得实时仿真具有最高的数值稳定性和精度。
并行求解
计算的趋势是使用共享内存处理器(SMP)来代替尝试使用更高时钟频率的单处理器。为了使高精度多体系统模型能在实时仿真中运行,客户需要利用多核来适应计算。
由于像衬套、弹簧、阻尼器等力单元与约束之间多自由度的耦合,在多体动力学中使用多处理器来分割计算是一项不同凡响的工作。在隐式积分方法设置中,这个运动方程耦合的难点不仅仅局限于约束之间,在力单元之间也有。
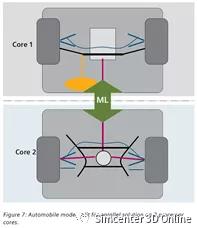
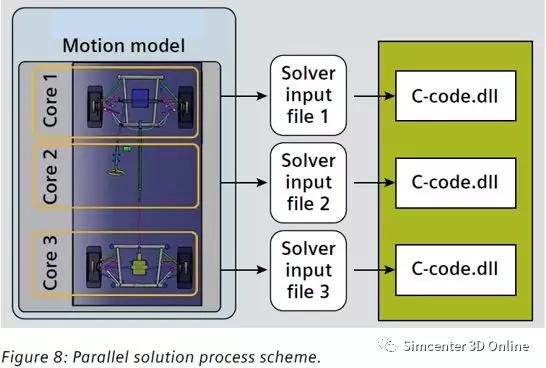
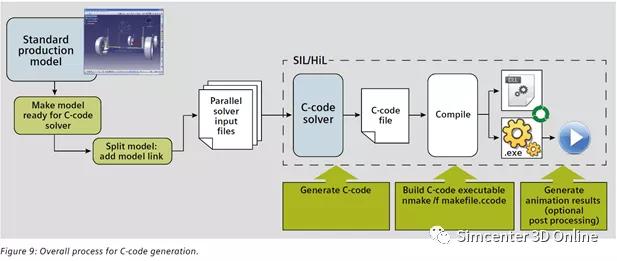
高性能实时仿真能通过将模型分割成两部分或者多部分来实施进行,每一个子模型由不同的处理器核来求解,并且与其他子模型进行协同仿真。这种分割可以是采用“切割运动副”的方法,但是对于车辆来说,切割底盘系统以及将底盘切割的各块分配到各处理器更容易一些。为了达到这个目的,在Simcenter3D Motion中可以是用一种叫做“Modellink”类似衬套的单元,这种单元可以通过用户定义的刚度和阻尼属性来连接将要进行并行求解模型的不同部分,确保参与协同仿真中所有处理器核之间保持适当的通讯(如图7所示)。
每个部分都被当做单独模型进行管理,针对每个单独模型产生C代码版本(图8-9所示)。除了描述(子)模型之外,每部分C代码版本也能包含求解器代码以运行模型,比如在硬件在环系统中直接求解各模型。从Simcenter3D Motion中输出的C代码文件能被编译成多种格式(DLL,EXE,matlab S-functions,MEXW32 文件 )。
耦合电、液、气等系统1D模型
Simcenter 3D Motion实时求解能集成1D形式的车辆子系统进行耦合仿真。SimcenterAmesim软件提供大量的机械、电气、液压等系统详细模型库,同时为Simcenter3D Motion提供专用的接口以方便的进行1D与3D模型之间的交互。虽然在实时协同仿真的标准应用中,涉及的所有的子系统都要求相同的集成步长(典型的是1ms=1kHz),但是Simcenter3D Motion实时求解器功能已扩展至能进行多速率仿真,以便能满足高频子系统的特殊要求,例如在内燃机点火载荷仿真中,需要高达5kHz的频率才能达到所需的结果精度。
结论
由于一系列的突破性技术, Simcenter 3D Motion实时求解器能帮助客户在详细的高性能复杂模型上进行实时仿真,同样支持在绝大多数实时硬件平台上运行1D&3D联合系统以及多速率系统仿真。
- 下一篇:奇瑞捷途X70完成座椅/头枕试验
- 上一篇:新能源汽车高压直流继电器测试



 广告
广告 



最新资讯
-
真正决定城市体验的,不是硬件,而是控制系
2026-04-02 14:26
-
LabVIEW传奇工程师亲临现场,NI测试测量技
2026-04-02 14:24
-
高压纹波——电驱系统正在被忽视的系统级风
2026-04-02 14:23
-
联合国法规R95对侧面碰撞乘员防护的工程化
2026-04-02 12:23
-
泰克2系列MSO混合信号示波器:远程控制与协
2026-04-01 15:56
