




 广告
广告





















































AVL中国自动驾驶论坛圆满落幕-行业精英齐聚共话自动驾驶技术和产业落地
2020-06-05 08:39:07· 来源:AVL李斯特

2019年10月31日,AVL中国自动驾驶论坛暨AVL成都软件中心开幕仪式在天府新区举行。论坛以高级别自动驾驶产业化的关键技术为主题,邀请了业内专家,知名车企、互联
2019年10月31日,AVL中国自动驾驶论坛暨AVL成都软件中心开幕仪式在天府新区举行。论坛以高级别自动驾驶产业化的关键技术为主题,邀请了业内专家,知名车企、互联网公司和大学代表围绕自动驾驶领域展开交流和探讨。

在当天的论坛上,京东X事业部自动驾驶产品总经理杨晶、Lotus工程中国自动驾驶部部长王成、梅赛德斯奔驰北美自动驾驶研发部门高级科学家袁汀教授、AVL奥地利总部车辆ADAS首席工程师Georg Teichtmeister等十一位专家学者、行业精英围绕高级别自动驾驶产业化的相关难题和挑战进行了主题演讲。
杨晶总经理则围绕自动驾驶在智能物流中的应用与实践做了探讨,介绍了京东物流配送机器人等智能化解决方案的发展情况以及应用应场景,在技术路线上面对的挑战和解决思路。
王成部长则主要阐释了在自动驾驶领域软件开发的挑战和机会。王成部长回顾了高级别自动驾驶的过往,对将要落地的技术从场景覆盖率,法规,基于数据的深度学习分析还是智能算法,人车安全和信息安全,验证方法等不同角度进行了探讨。
白杰教授以自动驾驶技术与产业化落地为主题,介绍了不同功能场景对毫米波雷达应用的需求,对几款毫米波雷达产品做了对比测试和分析,对未来毫米波雷达发展路线进行了探讨。
袁汀教授介绍了奔驰对于高级别自动驾驶开发落地的理解,同时针对国内应用场景的复杂性做了形象的演示和讨论。为了应对落地的挑战,系统配置从不同维度的考虑也是分享的精彩点。
以下是本次论坛详细报道:
AVL德国软件和功能有限公司总经理Schwab博士
AVL上海技术中心总经理Beste博士
AVL德国软件和功能有限公司总经理Schwab博士和AVL上海技术中心总经理Beste博士做了欢迎致辞。
AVL总部Graz车辆ADAS首席工程师Georg Teichtmeister
演讲主题:从系统设计到验证:快速进入市场的方法和流程
Georg对自动驾驶的系统设计到验证,从不同维度深入浅出的对故障容忍度、技术、方法、社会对高级别自动驾驶汽车的挑战进行了探讨。他介绍了AVL对此的理解,以及AVL在方法论,工具链,流程上应对技术落地作出的准备。
AVL ADAS产品&项目经理 Thomas Guntschnig
演讲主题:一种基于场景的针对高度自动驾驶汽车的测试、验证、认证路线
Thomas详细介绍了创建场景模型的分析和设计最佳覆盖率的测试计划。他提出一套基于仿真、虚拟测试、路面测试、真实环境等不同类型的优化测试方法和评判标准。并对AVL硬件、软件、方法论等方面的解决方案进行了展示。
AVL德国软件和功能开发经理刘颖博士
演讲主题1:自动驾驶汽车的视觉功能开发
演讲主题2:高速公路领航系统样车/重卡列队行驶的自动驾驶软件开发
刘博士介绍了AVL的流程和工具保证高级别自动驾驶落地的价值,同时介绍了AVL的通用化软件平台在全球顶级OEM不同量产项目的视觉开发中涉及到的难点。针对多激光雷达数据拼接和目标区分、摄像头目标跟踪、车道检测、SLAM等算法检测成果演示、毫米波雷达目标跟踪检测算法等、刘博士做了详细的讨论。
刘博士在第二个报告中,介绍了高速巡航功能应用场景、传感器配置以及E/E构架、轨迹算法实现、横向控制、纵向控制以及验证标定。随后刘博士从车队功能的初衷开始引出AVL和福特合作的车队功能开发的场景挑战,并对软件开发以及测试做了精彩的分享。
AVL天津技术中心功能安全团队经理宋雪静
演讲主题:针对自动驾驶汽车功能安全和预期功能安全的通用方案
宋雪静对AVL系统功能安全做了详细介绍,包括自动驾驶功能安全性、FuSa和SOTIF的通用方法,并列举了开发过程中涉及到安全的实例以及对应的降低风险的办法和预防措施。
AVL Graz模拟工程师陶剑波
演讲主题:AVL软件开发载荷矩阵:驾驶辅助和自动驾驶系统的优化验证
AVL Graz资深工程师陶剑波探讨了自动驾驶系统测试的挑战,介绍了AVL针对这些挑战所准备的软件开发载荷矩阵、基于覆盖率、博弈和KPI驱动以及感知系统的验证方法,并对以上的思路展开了详细的阐述和演示。
AVL上海技术中心ETV部门软件团队经理
演讲题目:基于实时动态差分技术的自动泊车功能开发和验证
陈婷针对AVP开发的边界定义和系统描述进行了探讨,并对关键技术包括视觉识别以及视觉子系统、人机界面开发、云服务器、定位导航、运动轨迹控制等方面做了深入的交流。
在当天的论坛上,京东X事业部自动驾驶产品总经理杨晶、Lotus工程中国自动驾驶部部长王成、梅赛德斯奔驰北美自动驾驶研发部门高级科学家袁汀教授、AVL奥地利总部车辆ADAS首席工程师Georg Teichtmeister等十一位专家学者、行业精英围绕高级别自动驾驶产业化的相关难题和挑战进行了主题演讲。
杨晶总经理则围绕自动驾驶在智能物流中的应用与实践做了探讨,介绍了京东物流配送机器人等智能化解决方案的发展情况以及应用应场景,在技术路线上面对的挑战和解决思路。
王成部长则主要阐释了在自动驾驶领域软件开发的挑战和机会。王成部长回顾了高级别自动驾驶的过往,对将要落地的技术从场景覆盖率,法规,基于数据的深度学习分析还是智能算法,人车安全和信息安全,验证方法等不同角度进行了探讨。
白杰教授以自动驾驶技术与产业化落地为主题,介绍了不同功能场景对毫米波雷达应用的需求,对几款毫米波雷达产品做了对比测试和分析,对未来毫米波雷达发展路线进行了探讨。
袁汀教授介绍了奔驰对于高级别自动驾驶开发落地的理解,同时针对国内应用场景的复杂性做了形象的演示和讨论。为了应对落地的挑战,系统配置从不同维度的考虑也是分享的精彩点。
以下是本次论坛详细报道:
AVL德国软件和功能有限公司总经理Schwab博士
AVL上海技术中心总经理Beste博士
AVL德国软件和功能有限公司总经理Schwab博士和AVL上海技术中心总经理Beste博士做了欢迎致辞。
AVL总部Graz车辆ADAS首席工程师Georg Teichtmeister
演讲主题:从系统设计到验证:快速进入市场的方法和流程
Georg对自动驾驶的系统设计到验证,从不同维度深入浅出的对故障容忍度、技术、方法、社会对高级别自动驾驶汽车的挑战进行了探讨。他介绍了AVL对此的理解,以及AVL在方法论,工具链,流程上应对技术落地作出的准备。
AVL ADAS产品&项目经理 Thomas Guntschnig
演讲主题:一种基于场景的针对高度自动驾驶汽车的测试、验证、认证路线
Thomas详细介绍了创建场景模型的分析和设计最佳覆盖率的测试计划。他提出一套基于仿真、虚拟测试、路面测试、真实环境等不同类型的优化测试方法和评判标准。并对AVL硬件、软件、方法论等方面的解决方案进行了展示。
AVL德国软件和功能开发经理刘颖博士
演讲主题1:自动驾驶汽车的视觉功能开发
演讲主题2:高速公路领航系统样车/重卡列队行驶的自动驾驶软件开发
刘博士介绍了AVL的流程和工具保证高级别自动驾驶落地的价值,同时介绍了AVL的通用化软件平台在全球顶级OEM不同量产项目的视觉开发中涉及到的难点。针对多激光雷达数据拼接和目标区分、摄像头目标跟踪、车道检测、SLAM等算法检测成果演示、毫米波雷达目标跟踪检测算法等、刘博士做了详细的讨论。
刘博士在第二个报告中,介绍了高速巡航功能应用场景、传感器配置以及E/E构架、轨迹算法实现、横向控制、纵向控制以及验证标定。随后刘博士从车队功能的初衷开始引出AVL和福特合作的车队功能开发的场景挑战,并对软件开发以及测试做了精彩的分享。
AVL天津技术中心功能安全团队经理宋雪静
演讲主题:针对自动驾驶汽车功能安全和预期功能安全的通用方案
宋雪静对AVL系统功能安全做了详细介绍,包括自动驾驶功能安全性、FuSa和SOTIF的通用方法,并列举了开发过程中涉及到安全的实例以及对应的降低风险的办法和预防措施。
AVL Graz模拟工程师陶剑波
演讲主题:AVL软件开发载荷矩阵:驾驶辅助和自动驾驶系统的优化验证
AVL Graz资深工程师陶剑波探讨了自动驾驶系统测试的挑战,介绍了AVL针对这些挑战所准备的软件开发载荷矩阵、基于覆盖率、博弈和KPI驱动以及感知系统的验证方法,并对以上的思路展开了详细的阐述和演示。
AVL上海技术中心ETV部门软件团队经理
演讲题目:基于实时动态差分技术的自动泊车功能开发和验证
陈婷针对AVP开发的边界定义和系统描述进行了探讨,并对关键技术包括视觉识别以及视觉子系统、人机界面开发、云服务器、定位导航、运动轨迹控制等方面做了深入的交流。



 广告
广告 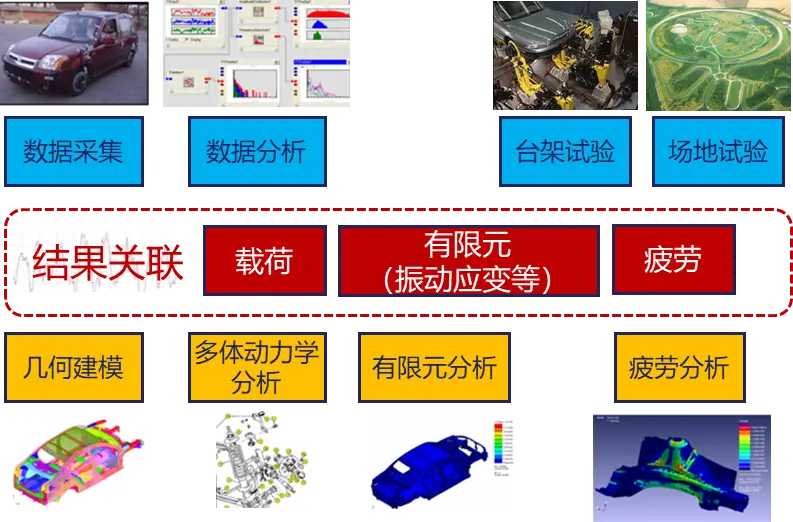


最新资讯
-
TSI® 服务计划确保卓越运营:基于客户的视
2025-08-04 20:59
-
imc STUDIO使用进阶培训及范例演示,明日开
2025-08-04 20:58
-
谱尼测试:专业赋能产业链创新 助推中国汽
2025-08-04 09:06
-
HMS重磅推出Ixxat Mobilizer与Ixxat CAN/FD
2025-08-04 09:05
-
商用车及工程机械行业专场:NVH 及语音音频
2025-08-01 17:12
