




 广告
广告





















































L3智能驾驶控制算法及验证、自动驾驶道路测试与数据采集、场景挖掘丨第二届智能汽车测试技术研讨会
2019-05-27 23:42:47· 来源:智车科技 作者:张良

2019年6月4日 - 6月5日在上海安亭举办第二届智赢未来智能汽车测试技术研讨会 。本次会议邀请了国内外知名机构的技术专家,分别来自江苏省智能网联汽车创新中心、
2019年6月4日 - 6月5日在上海安亭举办第二届“智赢未来 · 智能汽车测试技术研讨会 ”。本次会议邀请了国内外知名机构的技术专家,分别来自江苏省智能网联汽车创新中心、吉林大学、上海机动车检测认证技术研究中心有限公司、中国汽车工程研究院股份有限公司、Mobileye、GeneSys、4activeSystems、Stähle、Carhs、德国肯普滕应用技术大学,将带来最新EuroNCAP标准解读、国际先进测试技术与工具介绍、L3/L4级智能驾驶技术研究分享;也将进行面向 EuronCAP 2020 ADAS测试方案演示,与会技术专家将进行现场试验方案说明与数据解读。

第一届智能汽车测试技术研讨会
目前研讨会报告日程已确定,以下是十三位报告人发言摘要:
报告1:EuroNCAP最新趋势
作为最严格的新车碰撞测试EURO-NCAP测试,为消费者提供在欧洲销售的一些最受欢迎汽车安全性能的独立和可信的评估,评估的结果以得分和星级的方式来表示,其最为人熟知的工作内容是各种类型的碰撞试验,包括正面碰撞,侧面碰撞和柱碰等。既有传统的被动安全测试项目,也包含ABS、EBD、ESC、AEB、ELK、LKA、LDW等主动安全测试项目。GeneSys Electronik GmbH总裁Dr. Bertold Huber 将介绍EuroNCAP最新趋势。
报告2:基于视觉分析的场景挖掘技术
驾驶场景数据是智能网联汽车研发与测试的基础数据资源,是评价智能网联汽车功能安全的重要“案例库”与“习题集”,是重新定义智能汽车等级的关键数据依据。驾驶场景测试用例主要通过虚拟仿真环境及工具链进行复现,因此建设虚拟场景数据库是连接场景数据与场景应用的关键桥梁。目前,国内外自动驾驶测试能力都很欠缺,构建场景库过程需要对场景库架构分析,把典型的场景提炼出来,通过数据进行场景重构等。报告人江苏省智能网联汽车创新中心主任戴一凡博士将着重介绍场景库的应用背景、场景库的体系架构、视觉分析技术在场景挖掘中的应用等内容。
报告3:用于车辆主动安全测试的系统和假人
英国的4activeSystems是一家致力于用于汽车主动安全的假人模型和测试系统的公司,在主动安全领域颇有建树,开发和生产了多种先进测试技术和各种目标模型,比如行人、骑车人、摩托车或者其他模型,目的是模拟出真实的事故现场,视同模型来测试不同的探测系统。本次研习班邀请到了4activeSystems GmbH 的COO Martin Fritz,他将介绍用于车辆主动安全测试的系统和假人。
报告4:智能网联汽车相关法律和技术法规动态及趋势
完善的政策法规环境是智能网联汽车发展的重要保障,我国已经开始构建智能网联汽车产业发展的政策法规体系。在政府的大力支持下,随着汽车产业与电子信息通讯等技术加速深度融合,ADAS 系统普及率快速提升,车联网应用更加广泛。报告人曹建永博士是上海机动车检测认证技术研究中心有限公司新检测技术研究中心主任,他将在本次研习班上介绍各国关于智能汽车领域的立法进程,智能汽车法律法规所面临的核心问题,并将结合智能汽车发展进程及我国实际法律情况,提出推动相关法律体系建设的相关建议。
报告5:自动驾驶和紧急情况下的人类行为评估
自动驾驶的实现一方面需要在车的功能安全上做努力,另一方面也要研究清楚人与车如何交互,在L3自动驾驶情况下,车内人员是否能长期保持注意力;在紧急情况下,人类会出现什么行为等。CarhsGmbH CEO Rainer Hoffmann将带来题为“自动驾驶和紧急情况下的人类行为评估”报告,将通过大量调研数据对人类行为进行合理评估。
报告6:L3级智能驾驶控制算法及验证研究
智能驾驶汽车需要借助车载雷达、GPS、惯导与中央控制系统引导车辆实现安全行驶,中央控制系统依据检测到的路况信息发送前行、加速、转向、避让、刹车等各种指令到执行机构,由执行机构完成相应操作。L3级自动驾驶汽车往往涉及“人与车”的交互,通常需要建立一个高效的能够适应复杂汽车行驶工况的驾驶员模型进行“人—车—路”闭环仿真。报告人吉林大学汽车工程学院教授丁海涛博士将带来题为“L3级智能驾驶控制算法及验证研究”,丁博士及其吉林大学团队曾提出任意路径下的预瞄点搜索算法,使“预瞄—跟随”驾驶员建模理论可应用于任意道路路径和车速的跟随控制。根据车速变化不断更新侧向加速度增益,实现驾驶员模型方向控制和速度控制的解耦。
报告7:i-VISTA自动驾驶道路测试与数据采集一体化解决方案
i-VISTA(Intelligent Vehicle Integrated SystemsTest Area)是国家国家工信部及重庆市政府支持下,由中国汽研承担建设的智能汽车集成系统试验区,目的要建成先进驾驶辅助系统、V2X、自动驾驶、智慧交通等涉及的环境感知传感器、系统、整车的虚拟仿真测试、实验室测试、封闭、半封闭以及开放道路测试环境。报告人中国汽车工程研究院股份有限公司智能网联测试研发中心/测试工具装备总监蒲紫光将介绍i-VISTA自动驾驶道路测试与数据采集一体化解决方案。
报告8:您的安全,Mobileye的使命
当今社会对自动驾驶汽车的接受程度依赖于一个最重要的因素:技术开发者衡量风险、确保安全的能力。但是,绝对的安全并不存在。基于多年在汽车辅助驾驶领域的成功经验,Mobileye开发了一个名为RSS (Responsibility SensitiveSafety)的责任敏感安全模型,以期通过数学的方式来界定“安全状态”。在“安全状态”中,无论其他车辆做出任何反应,自动驾驶汽车都不可能引发事故。Mobileye 资深技术经理荀昌将带来Mobileye对驾驶安全最新理念。
报告9:面向(C-)NCAP ADAS及智能网联汽车仿真及场地测试的驾驶机器人系统
无论是自动驾驶汽车还是其他驾驶机器人在开发测试过程有很多统一性,通常都需要经历从仿真试验过渡到实车路试,作为未来的交通工具,自动驾驶汽车在进行规模化商用之前,必须进行充分的功能安全和性能安全测试验证,以确保消费者和公众的安全。测试内容包括传感器、算法、执行器、人机界面等,从应用功能、性能、稳定性和鲁棒性、功能安全、预期功能安全、型式认证等各个方面确保车辆能够自主上路。整个开发测试过程要经历软件在环(SiL)、硬件在环(HiL)、车辆在环(ViL)、封闭测试场测试、开放道路测试五大步骤。Stähle GmbH产品开发经理Dr. Alexander Schwarz将带来题为“面向(C-)NCAP ADAS及智能网联汽车仿真及场地测试的驾驶机器人系统”报告,详细讲解XIL交叉测试的过程。
报告10:基于三维路面实况地图的ADAS客观评价
随着汽车智能化技术的发展,车载ADAS功能越来越全面,基于三维路面实况地图的ADAS功能可以提供更清晰的路况画面,帮助驾驶员更安全的驾驶,但是也有很多不为人知的缺点。德国肯普滕应用技术大学讲师Sebastian Keidler将带来基于三维路面实况地图的ADAS客观评价。
报告11:智能驾驶功能安全与诊断方法研究
随着自动驾驶汽车的发展,在故障的情况下确保车辆安全变得越来越重要。智能驾驶的功能及系统特征功能的需求往往隐性认知难于显性表达,系统的运转设计域通常无穷且复杂的运转环境,实现的系统需要多学科领域、密切耦合。这就要求智能驾驶的功能既要遵从继承的传统车的功能安全标准(ISO 26262-2018),又要符合先进辅助驾驶的预期功能安全标准(ISO/PAS21448-2019)。第三位报告人吉林大学汽车工程学院教授高莹博士将分析和评估ADAS部分功能安全HARA,介绍如何设计基于结构化关系的故障诊断系统以及开发系统状态空间模型的故障诊断策略等。
报告12:面向L4级智能驾驶安全性测试技术研究
当自动驾驶汽车逐渐向更高阶(L4)自动化水平过渡时,其安全测试技术也会产生很大的变化,面对不同的ODD,人的参与度也越来越低,如何对L4级自动驾驶汽车进行安全性测试是未来需要面对的问题。上海测迅汽车科技有限公司CTO吕济明博士将通过多年来对自动驾驶测试技术的研究,为参会人员讲述面向L4级智能驾驶安全性测试技术。
报告13:面向EuronCAP 2020的ADAS测试方案演示介绍
近年来,ADAS技术层出不穷,作为最严苛的车辆测试技术EuronCAP 每年都有更新。最初,Euro NCAP的主动安全项目把ABS和EBD作为加分项出现的,到了2018年,最新一版Euro NCAP的规范中,主动安全功能(ABS,EBD,ESC)都已经不再作为加分项出现,而且功能的应用场景也有很大的变化。在一份报告中显示,EuroNCAP在2015-2020中,正前与侧面的碰撞测试要求将有一些重大的更新。上海测迅汽车科技有限公司 COO何山将演示和介绍面向EuronCAP 2020的ADAS测试方案,与参会嘉宾分享最新的EuroNCAP技术。
第一届智能汽车测试技术研讨会
目前研讨会报告日程已确定,以下是十三位报告人发言摘要:
报告1:EuroNCAP最新趋势
作为最严格的新车碰撞测试EURO-NCAP测试,为消费者提供在欧洲销售的一些最受欢迎汽车安全性能的独立和可信的评估,评估的结果以得分和星级的方式来表示,其最为人熟知的工作内容是各种类型的碰撞试验,包括正面碰撞,侧面碰撞和柱碰等。既有传统的被动安全测试项目,也包含ABS、EBD、ESC、AEB、ELK、LKA、LDW等主动安全测试项目。GeneSys Electronik GmbH总裁Dr. Bertold Huber 将介绍EuroNCAP最新趋势。
报告2:基于视觉分析的场景挖掘技术
驾驶场景数据是智能网联汽车研发与测试的基础数据资源,是评价智能网联汽车功能安全的重要“案例库”与“习题集”,是重新定义智能汽车等级的关键数据依据。驾驶场景测试用例主要通过虚拟仿真环境及工具链进行复现,因此建设虚拟场景数据库是连接场景数据与场景应用的关键桥梁。目前,国内外自动驾驶测试能力都很欠缺,构建场景库过程需要对场景库架构分析,把典型的场景提炼出来,通过数据进行场景重构等。报告人江苏省智能网联汽车创新中心主任戴一凡博士将着重介绍场景库的应用背景、场景库的体系架构、视觉分析技术在场景挖掘中的应用等内容。
报告3:用于车辆主动安全测试的系统和假人
英国的4activeSystems是一家致力于用于汽车主动安全的假人模型和测试系统的公司,在主动安全领域颇有建树,开发和生产了多种先进测试技术和各种目标模型,比如行人、骑车人、摩托车或者其他模型,目的是模拟出真实的事故现场,视同模型来测试不同的探测系统。本次研习班邀请到了4activeSystems GmbH 的COO Martin Fritz,他将介绍用于车辆主动安全测试的系统和假人。
报告4:智能网联汽车相关法律和技术法规动态及趋势
完善的政策法规环境是智能网联汽车发展的重要保障,我国已经开始构建智能网联汽车产业发展的政策法规体系。在政府的大力支持下,随着汽车产业与电子信息通讯等技术加速深度融合,ADAS 系统普及率快速提升,车联网应用更加广泛。报告人曹建永博士是上海机动车检测认证技术研究中心有限公司新检测技术研究中心主任,他将在本次研习班上介绍各国关于智能汽车领域的立法进程,智能汽车法律法规所面临的核心问题,并将结合智能汽车发展进程及我国实际法律情况,提出推动相关法律体系建设的相关建议。
报告5:自动驾驶和紧急情况下的人类行为评估
自动驾驶的实现一方面需要在车的功能安全上做努力,另一方面也要研究清楚人与车如何交互,在L3自动驾驶情况下,车内人员是否能长期保持注意力;在紧急情况下,人类会出现什么行为等。CarhsGmbH CEO Rainer Hoffmann将带来题为“自动驾驶和紧急情况下的人类行为评估”报告,将通过大量调研数据对人类行为进行合理评估。
报告6:L3级智能驾驶控制算法及验证研究
智能驾驶汽车需要借助车载雷达、GPS、惯导与中央控制系统引导车辆实现安全行驶,中央控制系统依据检测到的路况信息发送前行、加速、转向、避让、刹车等各种指令到执行机构,由执行机构完成相应操作。L3级自动驾驶汽车往往涉及“人与车”的交互,通常需要建立一个高效的能够适应复杂汽车行驶工况的驾驶员模型进行“人—车—路”闭环仿真。报告人吉林大学汽车工程学院教授丁海涛博士将带来题为“L3级智能驾驶控制算法及验证研究”,丁博士及其吉林大学团队曾提出任意路径下的预瞄点搜索算法,使“预瞄—跟随”驾驶员建模理论可应用于任意道路路径和车速的跟随控制。根据车速变化不断更新侧向加速度增益,实现驾驶员模型方向控制和速度控制的解耦。
报告7:i-VISTA自动驾驶道路测试与数据采集一体化解决方案
i-VISTA(Intelligent Vehicle Integrated SystemsTest Area)是国家国家工信部及重庆市政府支持下,由中国汽研承担建设的智能汽车集成系统试验区,目的要建成先进驾驶辅助系统、V2X、自动驾驶、智慧交通等涉及的环境感知传感器、系统、整车的虚拟仿真测试、实验室测试、封闭、半封闭以及开放道路测试环境。报告人中国汽车工程研究院股份有限公司智能网联测试研发中心/测试工具装备总监蒲紫光将介绍i-VISTA自动驾驶道路测试与数据采集一体化解决方案。
报告8:您的安全,Mobileye的使命
当今社会对自动驾驶汽车的接受程度依赖于一个最重要的因素:技术开发者衡量风险、确保安全的能力。但是,绝对的安全并不存在。基于多年在汽车辅助驾驶领域的成功经验,Mobileye开发了一个名为RSS (Responsibility SensitiveSafety)的责任敏感安全模型,以期通过数学的方式来界定“安全状态”。在“安全状态”中,无论其他车辆做出任何反应,自动驾驶汽车都不可能引发事故。Mobileye 资深技术经理荀昌将带来Mobileye对驾驶安全最新理念。
报告9:面向(C-)NCAP ADAS及智能网联汽车仿真及场地测试的驾驶机器人系统
无论是自动驾驶汽车还是其他驾驶机器人在开发测试过程有很多统一性,通常都需要经历从仿真试验过渡到实车路试,作为未来的交通工具,自动驾驶汽车在进行规模化商用之前,必须进行充分的功能安全和性能安全测试验证,以确保消费者和公众的安全。测试内容包括传感器、算法、执行器、人机界面等,从应用功能、性能、稳定性和鲁棒性、功能安全、预期功能安全、型式认证等各个方面确保车辆能够自主上路。整个开发测试过程要经历软件在环(SiL)、硬件在环(HiL)、车辆在环(ViL)、封闭测试场测试、开放道路测试五大步骤。Stähle GmbH产品开发经理Dr. Alexander Schwarz将带来题为“面向(C-)NCAP ADAS及智能网联汽车仿真及场地测试的驾驶机器人系统”报告,详细讲解XIL交叉测试的过程。
报告10:基于三维路面实况地图的ADAS客观评价
随着汽车智能化技术的发展,车载ADAS功能越来越全面,基于三维路面实况地图的ADAS功能可以提供更清晰的路况画面,帮助驾驶员更安全的驾驶,但是也有很多不为人知的缺点。德国肯普滕应用技术大学讲师Sebastian Keidler将带来基于三维路面实况地图的ADAS客观评价。
报告11:智能驾驶功能安全与诊断方法研究
随着自动驾驶汽车的发展,在故障的情况下确保车辆安全变得越来越重要。智能驾驶的功能及系统特征功能的需求往往隐性认知难于显性表达,系统的运转设计域通常无穷且复杂的运转环境,实现的系统需要多学科领域、密切耦合。这就要求智能驾驶的功能既要遵从继承的传统车的功能安全标准(ISO 26262-2018),又要符合先进辅助驾驶的预期功能安全标准(ISO/PAS21448-2019)。第三位报告人吉林大学汽车工程学院教授高莹博士将分析和评估ADAS部分功能安全HARA,介绍如何设计基于结构化关系的故障诊断系统以及开发系统状态空间模型的故障诊断策略等。
报告12:面向L4级智能驾驶安全性测试技术研究
当自动驾驶汽车逐渐向更高阶(L4)自动化水平过渡时,其安全测试技术也会产生很大的变化,面对不同的ODD,人的参与度也越来越低,如何对L4级自动驾驶汽车进行安全性测试是未来需要面对的问题。上海测迅汽车科技有限公司CTO吕济明博士将通过多年来对自动驾驶测试技术的研究,为参会人员讲述面向L4级智能驾驶安全性测试技术。
报告13:面向EuronCAP 2020的ADAS测试方案演示介绍
近年来,ADAS技术层出不穷,作为最严苛的车辆测试技术EuronCAP 每年都有更新。最初,Euro NCAP的主动安全项目把ABS和EBD作为加分项出现的,到了2018年,最新一版Euro NCAP的规范中,主动安全功能(ABS,EBD,ESC)都已经不再作为加分项出现,而且功能的应用场景也有很大的变化。在一份报告中显示,EuroNCAP在2015-2020中,正前与侧面的碰撞测试要求将有一些重大的更新。上海测迅汽车科技有限公司 COO何山将演示和介绍面向EuronCAP 2020的ADAS测试方案,与参会嘉宾分享最新的EuroNCAP技术。



 广告
广告 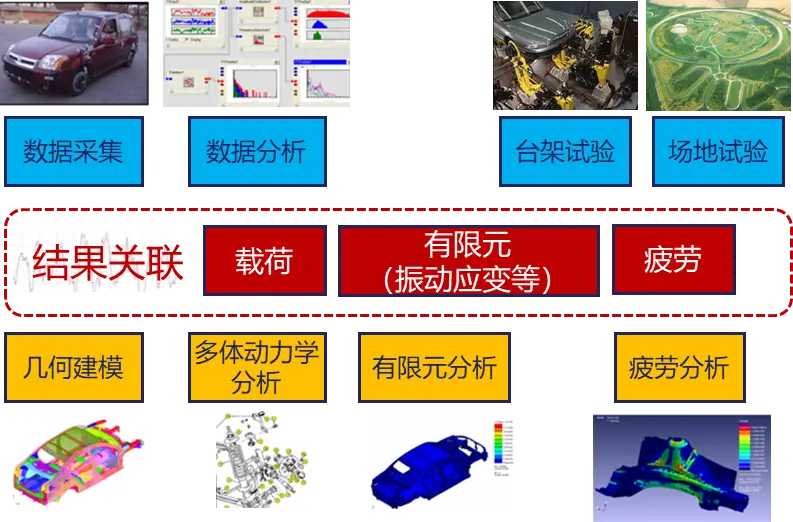


最新资讯
-
整车主观性能评价工程技术与主客观数据关联
2026-01-24 10:16
-
整车检测线技术及智能化发展进展解析
2026-01-24 10:15
-
车辆外形与风阻测试技术及其在能效优化中的
2026-01-24 10:14
-
整车排放测试技术与法规验证方法解析
2026-01-24 10:14
-
整车噪声测试技术与电动化背景下的声学评价
2026-01-24 10:13
