




 广告
广告





















































整车通过性虚拟仿真

01.前言
随着电动车的普及,汽车通过性越来越成为一个人们关注的话题。电动车由于离地间隙比较低,现实生活中坑坑坎坎以及极限坡度车库层出不穷,使得车辆行驶过程中很容易发生车辆“蹭地”甚至“托底”的尴尬状况。目前各大主机厂的开发主要是依靠设计阶段控制静态离地间隙和样车出来之后的路试验证,其与真实场景的关联未可知,往往早期不能及时识别动态干涉问题。整车通过性虚拟仿真技术的出现可以借助CAE的手段,建立车辆、驾驶员、场景等模型,能够快速在设计阶段预测整车的动态离地间隙,缩短开发周期,减少试验成本。
02.关键技术
整车通过性虚拟仿真的关键技术包括数字样车、虚拟驾驶员、虚拟场景以及算法和结果可视化。其中数字样车是基础,决定仿真的精度;虚拟驾驶员和场景再现真实的通过性工况;算法及结果可视化实现风险位置能够更为直观的识别。
2.1 数字样车建模
数字样车的建模,主要包括外形和内核两大块。外形定义了车身和轮胎的轮廓和位置,其运用前沿图形图像处理软件,保证几何重构模型的材质和渲染的还原度。而内核则是体现这辆车的运动学和动力学属性。数字样车建模包括整车参数、整车配重和簧下质量、弹性元件特性曲线、轮胎模型、虚拟传感器等设定,以及最核心的SKC文本的定义。SKC是基于物理或虚拟的悬架外特性生成的控制文本,表征车辆轮心和弹性元件的运动和动力学属性(如图一所示)。
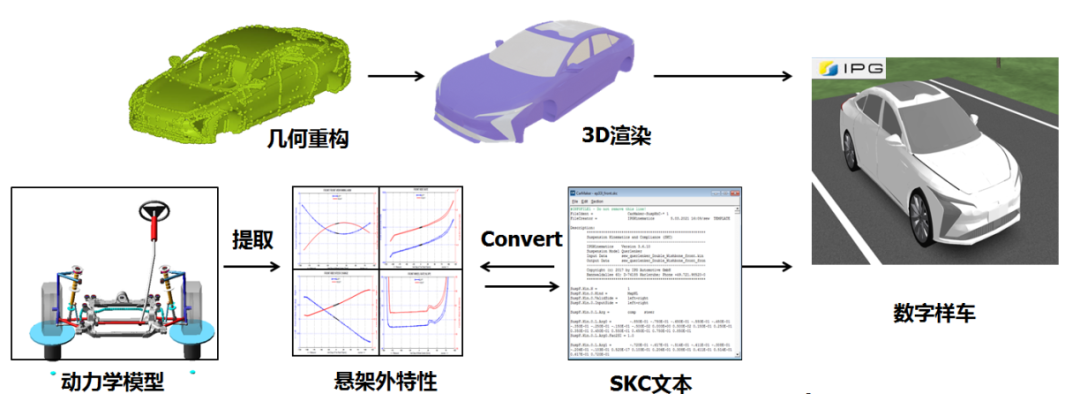
图一 数字样车模型
2.2 虚拟驾驶员建模
虚拟驾驶员的建模中,会根据车辆本身的特点和驾驶的需求定义不同的操作规范,不同的动力、速度、加速度和转向等控制。虚拟驾驶员还可以根据用户设定的油门、制动、离合器踏板位置,以及不同的档位进行行驶。驾驶员的行为也可以进行保守、正常和激进等风格设定(如图二所示)。
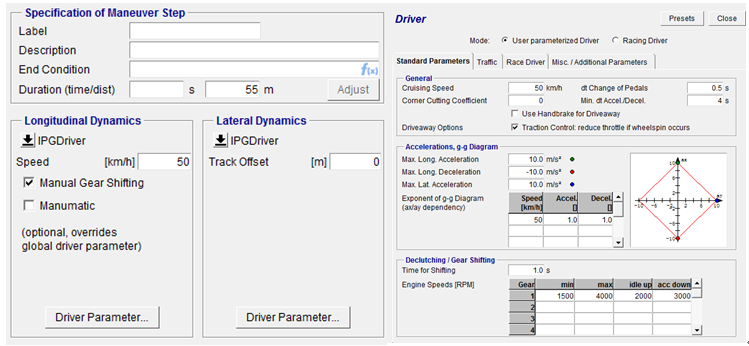
图二 虚拟驾驶员模型
2.3 虚拟场景建模
虚拟场景是实现物理场景虚拟化的平台。其特征路面可以分段建立,有利于快速搭接组合,形成新的场景;其车道数量、车道宽度、转弯半径任意设定,可以快速验证不同路面参数的车辆响应;其路面高度、宽度落差任意可调,有利于形成不同的用户场景,验证车辆的通过性能。
值得一提的是,通过性综合场景充分考虑历史车型磕碰问题的高频路面,结合多条用户调研产生的火车站、卖场、酒店和综合广场、写字楼等的极限坡道路面,最终构建完整的“整车通过性场景“(如图三所示)。
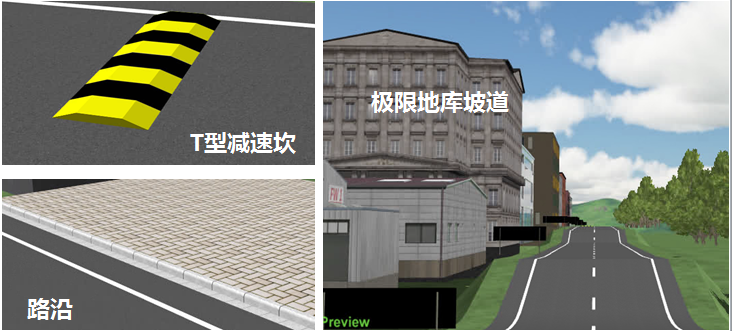
图三 典型通过性场景案例
2.4 干涉算法开发及结果可视化
为了准确识别通过性风险,需要准确的实时提取路面与整车的最小运动间隙。通过干涉算法开发,将车底与路面特征分别进行离散化建模,采用自主算法计算路面和车辆的相对位置关系,识别干涉位置,最终进行通过性可视化展现(如图四所示)。
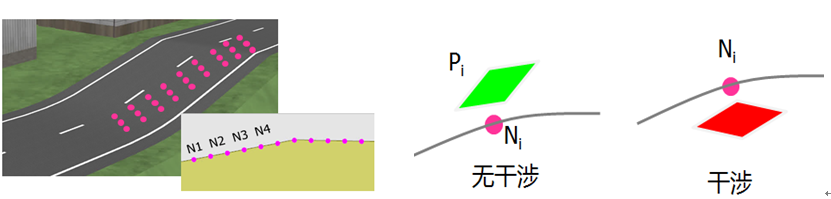
图四 整车通过性接触算法
03.仿真应用
整车通过性虚拟仿真技术可以在车辆行驶过程中实时展现风险区域,同步输出具体的干涉位置和干涉量(如图五所示)。这样就能快速在设计阶段预测整车的动态离地间隙,供整车布置、底盘设计等功能组进行高效迭代优化。



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
