




 广告
广告





















































ASAM OpenScenario1.2.0正式发布

编者寄语:2022年5月13日,ASAM OpenScenario1.2.0正式发布。本次1.2.0版本具体包含了什么内容?相对于之前的版本究竟有哪些改进和提升?让我们共同来查看!
01、ASAMOpenScenario概述
ASAM OpenSCENARIO的内容包括用于描述驾驶模拟应用程序中的动态内容的规范和文件模式。其主要用途是描述涉及多个车辆的复杂运动情况。
ASAM OpenSCENARIO可用于ADAS系统和自动驾驶等功能的虚拟仿真开发、测试和验证。该标准可与ASAM OpenDrive和ASAM OpenCRG结合使用,这两项标准共同描述了自动驾驶模拟场景中的静态内容。

☝ ASAM OpenDrive、OpenScenario以及OpenCRG的关系
场景描述对于测试、验证ADAS系统和自动驾驶汽车的安全性至关重要。行业、认证机构和政府部门共同定义了可用于测试和验证此类系统安全运行的场景库。一个公开开发和独立于特定供应商的标准,例如ASAM OpenSCENARIO,通过在各种模拟应用程序中支持场景的交换和可用性来支持这一目标。
例如,在ASAM OpenSCENARIO的帮助下,可以在各种模拟器上运行大量的关键场景。因此,与在真实交通中进行实车道路测试相比,所需要的测试公里数和成本可以大大减少。
02、场景(scenario)到底是什么?
自动驾驶环境下的场景是对世界的观点如何随时间变化的描述,通常是从某个特定的角度出发。在车辆和驾驶任务的背景下,包括对世界中的固定(静态)元素,如道路布局和路侧设施,和世界中的可改变(动态)元素,如天气、光照、车辆、物体、行人、交通信号灯状态等。该描述与整个环境是否为模拟的、真实的,还是两者的任何组合均无关。
在模拟仿真的环境中,一个完整的场景由以下部分组成:
静态环境描述,具体包括:
● 逻辑路网结构;
● 可选的物理几何道路及环境描述。
动态内容描述,具体包括:
● 动态实体行为的整体描述与协同行为;
● 动态实体的可选行为模型。
03OpenScenario标准包含了哪些内容?
ASAM OpenSCENARIO定义了一个数据模型和派生文件格式,用于描述在交通模拟器以及汽车模拟仿真开发、测试和验证中使用的场景。ASAM OpenSCENARIO的首要用例是描述涉及多个实体(如车辆、行人和其他交通参与者)的复杂以及协同的操作。
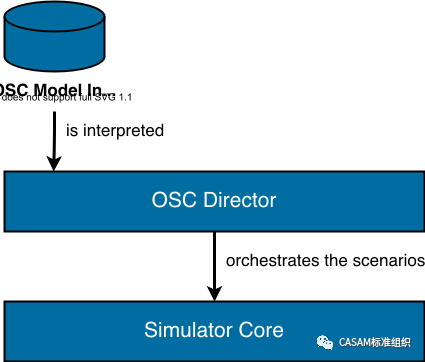
ASAM OpenScenario基础架构
对场景的描述可以基于驾驶行为,例如,进行车道变换,或根据记录的驾驶动作推导出的行驶轨迹。该标准通过定义层次元素为场景提供了描述方法,从这些元素构建场景、它们的属性和关系。这种方法包括:
● 故事板(storyboard),也就是驾驶场景情节的用法。每个故事由一个或多个动作和运动组成。
● 当触发条件处理结果为真(true)时,由触发器触发事件,即事件导致特定操作的执行。
● 参考逻辑道路网络描述。
● 实体的实例化,如车辆或行人,在道路上或道路外活动。
● 目录和参数声明提供了重用场景多个方面的机制。
其他内容,如对被测车辆、实体外观、行人、交通和环境状况的描述,也包含在标准中。
ASAM OpenSCENARIO中的场景描述以层次结构组织,并以文件扩展名.xosc的XML文件格式序列化。
ASAM OpenSCENARIO定义了(模拟)世界的动态内容,例如交通参与者的行为。静态组件如道路网络等并非ASAM OpenSCENARIO的一部分,但是可以被特定格式引用。
04OpenScenario 1.2.0进行了哪些更新?
自发布以来,OpenScenario已经进行了多次的迭代与修订,具体修订情况可查看下表:

OpenScenario修订版本回顾
与ASAM OpenSCENARIO v1.1.x相比,ASAM OpenSCENARIO v1.2主要进行了以下修订:
(1) 支持虚拟传感器识别测试
● 可参考天空和照明图像
● 拥有更多自定义属性选项
(2) 支持传感器误差注入
● 实体False positive / false negative等情况验证
(3) 引入更多变量参数
● 将概念与参数分离
● 可以在运行时进行更改
● 允许外部访问
(4)支持多控制器
● 横向或纵向控制
● 新增两种控制器类型(动画/灯光)
(5)提升了控制器优先级设定
● 物理数值
● 动态限制(最大速率、最大扭矩等)
(6)新的实体角色属性
● 警察、救护车等特种车辆
(7)新的灯光动作
● 车辆灯光
(8)新的动画行为
● 车辆组件(车门、车窗、后视镜等)
● 行人的运动与姿势
● 可引用3D动作文件
(9)新的速度剖面动作
● 用于模拟真实的速度剖面
(10)可扩展交通大规模行为
● 速度范围
● 行进方向
(11)可扩展速度和加速度条件
● 可按照每个维度设置(横向、纵向、横纵向均有)
(12)概念澄清
● 坐标系统和旋转
● 位置类型(尤指道路/车道)
● 相对和绝对方向所在位置及默认值
● 速度(纵向/横向维度)
● 跨道路的距离计算
● 路径计算
● 路径规划
● 闭合轨迹
● 场景和测试用例/运行时环境之间的接口
● 行动中实体的动态约束
● 行动的先决条件
● 添加/删除实体操作
(13)修正与修复
● 数据类型integer → int
● 挂轮齿数:double →手动为int,自动为enum
● overwrite → override
● 状态机状态(待机standby与完成complete)
● 地理位置精度
(14)标准统一
● 云服务状态(ASAM OSI)
● 交通信号灯控制器(ASAM OpenDrive)
以上即为本次分享的内容。
如需获取ASAM OpenScenario 1.2.0完整版标准内容,请关注“CASAM标准组织”公众号输入“OSC1.2”关键字获取官网下载链接。



 广告
广告 编辑推荐




最新资讯
-
面向自动驾驶系统的人工智能数据集评估建议
2025-11-03 21:06
-
电动汽车车架模态性能分析
2025-11-03 21:04
-
一汽车项目落地南京,项目总投资约40亿元!
2025-11-03 21:04
-
全球86个品牌角逐 东风胜利轮胎入选2025中
2025-11-03 17:11
-
一汽车项目落地南京,项目总投资约40亿元!
2025-11-03 11:51
