




 广告
广告





















































iSWACO-ARGUS实现试验场仪器化和自动化
2021-01-27 23:27:39· 来源:泽尔测试 作者:王军宇

自动驾驶车辆的在环测试基于试验场景的PAD,HAD和FAD车辆在试验场上的高效测试。iSWACO-ARGUS是车在环解决方案,用于开发,验证,确认和认证,还用于部分,高度
自动驾驶车辆的在环测试基于试验场景的PAD,HAD和FAD车辆在试验场上的高效测试。
iSWACO-ARGUS是“车在环”解决方案,用于开发,验证,确认和认证,还用于部分,高度和全自动驾驶系统(ADS)的安全相关动态驾驶任务(DDT)功能,例如物体检测和响应系统(OEDR)。它涵盖了所有SAE级别的自动驾驶测试,即从L1级“动手”到L4级“放手”和L5级“放手,没有驾驶员”,并具有单个测试基础结构。iSWACO-ARGUS的任务是“通过ARGUS进行群体控制和持续监视”,并控制和监控试验场上所有真实和虚拟物体的运动行为。它提供了无与伦比的灵活性,可以在试验场的真实模拟复杂交通场景和执行精确的可重复测试,或者甚至在公共道路上监控车辆行为。iSWACO-ARGUS的基础设施可以快速、简单、安全地安装在任意的试验场和测试车辆上。因此,它是OEM和测试/认证组织的测试和自动化解决方案。
基于场景和轨迹的测试:iSWACO-ARGUS的主要功能和优势:
• 灵活的体系结构–轻松适用于全球范围内有关基础结构所有试验领域。
• 由于能够以最少的人力执行单独和完全可重复的测试方案,因此节省了成本。
• 不需要转向或驾驶机器人。通过车辆内部的执行器或控制回路控制交通模拟车辆(TSV)的转向/油门/制动。因此,与竞争对手的系统相比,iSWACO-ARGUS节省了很多设置时间。除了TSV和SCT(软目标)之外,还可以管理所谓的虚拟元素(VE)。
• 根据需要支持其他制造商的转向,制动或驾驶机器人等组件(ABD,Vehico,Stähle等)。
• iSWACO-ARGUS软件包括您在试验场上进行PAD / HAD / FAD测试所需的一切,即:
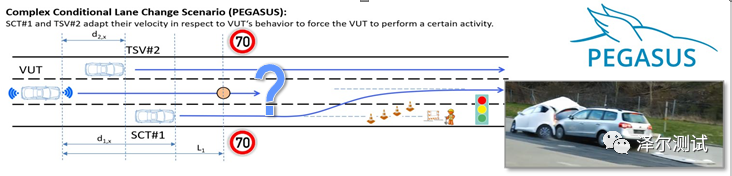
1,iMAR独特的工具链可实现无缝的工作流程,从模拟仿真(OpenSCENARIO;其他如CarMaker等按需导入)的交通场景,到在试验场进行的实际测试,均符合PEGASUS的方法。
2,iMAR的iARGUS-CC控制中心带有iARGUS-CMD软件,可用于轨迹导入,适应试验场,验证和测试执行,安全监控,实时以及回放模式下的测试可视化,数据存储和数据导出。
3,iMAR的车辆定位和制导与控制硬件可用于10 ++个移动物体,即基于INS / GNSS / ODO技术和认知视觉来管理交通模拟车辆(TSV),软碰撞目标(SCT)和被测车辆(VUT) ,也可以在厘米级精度的GNSS拒绝测试区域(也可以在实际GNSS中断条件下测试VUT)中操作。还支持带有标准化接口的虚拟元素(VE)。
4,iMAR的交通模拟车辆iTSV-KIA-NIRO作为交钥匙解决方案,可在交通场景中进行无人驾驶操作(其他定制)。
5,基于INS / GNSS和可选iARGUS-MV机器视觉的iMAR碰撞预警和避免系统iARGUS-RCS。
6,iMAR的移动iDMN动态网状网络通信,对数据,视频和语音的延迟最小。还支持5G。
• 该实施方案涵盖了未来ISO 22133-1“道路车辆-主动安全性和自动/自动驾驶汽车测试的测试对象监视和控制”标准的建议。iMAR是ISO工作组的一部分。
• iSWACO-ARGUS的开发已由德国最大的公司之一PEGASUS内部提供支持测试,打算成为受测自动驾驶和自动驾驶汽车未来认证的基础达到SAE 5级,并由一家大型德国汽车制造商制造。
技术数据iSWACO-ARGUS
除非另有说明,否则所有数据均为RMS值
本地化性能(在每辆车上):iTraceRT-MVT-510或iTraceRT-MVT-200 / SLN

位置精度:2 cm [CEP] INS/GNSS/ODO, RTK
<0.1%总里程 丢失GNSS信号
速度的准确性: 0.02 m/s INS/GNSS/ODO
横滚/俯仰/航向精度: < 0.05° / 0.05° / 0.05° INS/GNSS/ODO,RTK
陀螺仪/加速性能iTraceRT-MVT-510:< 0.1 °/h / 0.2 mg day2day | < 0.01 °/h / 0.04 mg AV
陀螺仪/加速性能iTraceRT-MVT-200:< 3 °/h / 1 mg in motion | < 0.5 °/h / 0.06 mg AV
航向/横滚/俯仰范围:0…360° / ±180° / ±90°
角速率范围:±400 °/s
加速度范围:±10 g(其他可选)
数据输出速率/带宽;数据延迟:1…500 Hz / 200 Hz;<2毫秒延迟,1毫秒抖动
接口:

串行数据:3 x UART RS422或RS232(iXCOM,NMEA 0183)
以太网:1 x TCP / IP或UDP(通过iXCOM / NMEA的数据和状态)
CAN总线:标准协议(数据,状态)
GNSS校正数据输入:RTCM(来自iREF-GNSS,iREF-LITE,通过NTRIP或GSM) GNSS(GPS / GLonASS / BEIDOU / GALILEO):集成多星座,所有频率均支持
GNSS引擎(500个频道);单天线和双天线。
里程表输入:RS422电平(A / B)正交信号或脉冲fw./bw./dir
物理/操作/环境参数:
电源电压:12 V DC(10…35 V DC)
功耗:分别为25 W(iTraceRT-MVT-510)。10 W(iTraceRT-MVT-200)
尺寸:187 x 128 x 196毫米(-510)102 x 62 x 138毫米(-200)
重量:<5.7公斤(-510)<900克(-200)
工作/存储温度; 湿度:-40…+ 65°C / -45…+ 75°C;8…100%相对。
外壳/防护类别:全密封铝制外壳/ IP 67
配件:
包括:
- 图形用户界面iXCOM-CMD(Windows / Linux)
- 操作手册(使用和维护)
- 内部数据记录器(最大128 GByte),也用于车辆的诊断界面(CAN / ETH)
可选:
- 多套电缆,GNSS和RF天线固定装置,测试车辆上的不间断电源等,支持本地定位系统(例如LOCATA),试验场的机载实时视频监控
- PTP或NTP时间服务器功能
- iDMN动态网状网络,iARGUS-RCS(屋顶通信和传感器头)
标准:将来的ISO 22133-1(尚未通过ISO批准– iMAR是标准化工作组的成员)

*惯性传感器性能(偏置、噪声、比例因子精度、带宽等)越好,即使在某些GNSS中断或在城市峡谷中(例如,实现较低的测量标准偏差),系统性能也可以保持得更好。有关详细信息,请参见专用数据表。iTraceRT-MVT-60x,-510,-500和-200系列的汽车系统通过接口和硬件与我们的常用系统iNAT-RQT,-FSLG,-FSSG,-M200等完全兼容。
iARGUS-CMD:
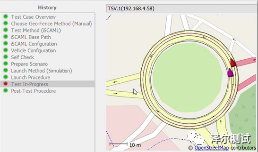
从OpenScenario测试描述到实际测试执行以及结果协议生成,
控制您的工作流程-在每个试验场上,无论通道形状如何。
用于试验场的所有自动化组件(硬件和软件)均由iMAR设计和提供:


• 每辆车上的iMAR INS / GNSS本地化系统,即带有可选车辆控制系统(iARGUS-VCS)和不间断电源iARGUS-UPS的iTraceRT-MVT-510,iTraceRT-MVT-500或iTraceRT-MVT-M200。iTraceRT-MVT系列是专门为数据延迟最小的自动驾驶汽车设计的。基于认知视觉的立体相机系统iARGUS-MV可用于基于AI的环境感知。板载实时传感器数据监控和记录(内部和外部摄像机,麦克风,通过CAN的OBD等),并带有精确的时间戳。
• iMAR的iREF-GNSS RTK校正数据采集和分配系统可实现cm精度。
iMAR的基于动态网格的通信网络(iDMN),具有可选的加密多车对车和车对控制中心通讯。最小的数据延迟,反射缓解,快速重新获取和自配置设置。安装可以包括一个15 m的天线桅杆,移动热点或基于无人机的数据分发(飞行热点),并带有集成的稳定高清摄像机,以证明对地面测试场景的观察(支持全自动起飞,飞行和着陆;不间断运行时间长达12小时以上,作为选择)。

具有iARGUS-CMD软件的iMAR iARGUS-CC控制中心,用于测试设置,从OpenSCENARIO(选件)导入场景,每辆车的轨迹规划,仿真,测试执行,数据存储,设备监控;含可视化控制台,iDMN通信,可选。不间断电源和用于RTK校正的iREF-GNSS。
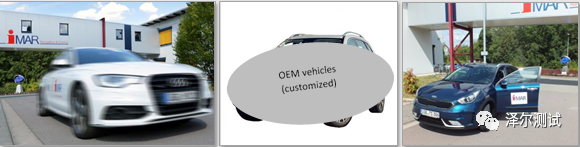
iMAR的交通模拟车辆,类型为iTSV-KIA-NIRO或类似型号,带有集成的执行器接口,作为通过iARGUS-VCS / iARGUS-LTG,基于iTraceRT-MVT的INS / GNSS / ODO本地化和iDMN-OHS动态网格的轨迹控制的交钥匙解决方案。示例:OEM车辆,奥迪RS7,起亚NIRO,其他按需(定制)。
将软目标(SCT)集成到测试设置中:4a Systems的目标(作为4activeFB),包括用于高精度定位,导航和控制的集成iTraceRT-MVT,或按需提供的DSD / Humanetics,ABD或DRI的其他目标。

测试准备,仿真,执行和记录:iARGUS-CMD中的工作流程:
1、场景规划,OpenX文件或其他格式的导入,预测试评估;
2、通过iDMN或5G将轨迹传输到每个目标的车辆控制器并进行测试仿真;
3、根据测试进度执行测试和在线轨迹适应;
4、测试评估和自动生成报告。

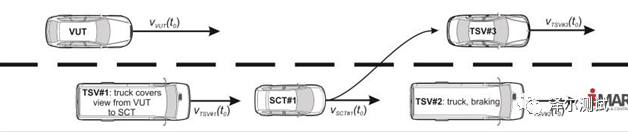
交通场景中所有集群车辆要执行的轨迹(可按需同时运行10 ++ VUT,TSV,SCT,VE)以及活动基础设施元素ISE的时间(更改交通信号灯时,限速信息) 等)由iARGUS-CC控制中心软件iARGUS-CMD生成,或自动从OpenSCENARIO(按需提供其他类似CarMaker之类)生成的数据集中导入并适应PG。
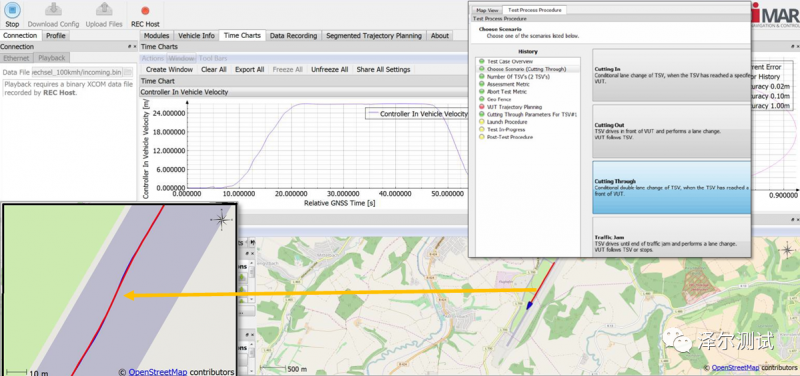
iMAR的轨迹导入、计划、仿真、测试执行、可视化和数据导出工具iARGUS-CMD:
示例:以100 g / h的横向加速度以0.5 g(!)的横向变化(横向3.75 m),以全自动模式(出厂扩展)驾驶OEM车辆(通过iMAR的带iARGUS-VCS的iTraceRT-MVT-200,包括执行器接口)在Zweibrücken的试验场上。
iSWACO-ARGUS是“车在环”解决方案,用于开发,验证,确认和认证,还用于部分,高度和全自动驾驶系统(ADS)的安全相关动态驾驶任务(DDT)功能,例如物体检测和响应系统(OEDR)。它涵盖了所有SAE级别的自动驾驶测试,即从L1级“动手”到L4级“放手”和L5级“放手,没有驾驶员”,并具有单个测试基础结构。iSWACO-ARGUS的任务是“通过ARGUS进行群体控制和持续监视”,并控制和监控试验场上所有真实和虚拟物体的运动行为。它提供了无与伦比的灵活性,可以在试验场的真实模拟复杂交通场景和执行精确的可重复测试,或者甚至在公共道路上监控车辆行为。iSWACO-ARGUS的基础设施可以快速、简单、安全地安装在任意的试验场和测试车辆上。因此,它是OEM和测试/认证组织的测试和自动化解决方案。
基于场景和轨迹的测试:iSWACO-ARGUS的主要功能和优势:
• 灵活的体系结构–轻松适用于全球范围内有关基础结构所有试验领域。
• 由于能够以最少的人力执行单独和完全可重复的测试方案,因此节省了成本。
• 不需要转向或驾驶机器人。通过车辆内部的执行器或控制回路控制交通模拟车辆(TSV)的转向/油门/制动。因此,与竞争对手的系统相比,iSWACO-ARGUS节省了很多设置时间。除了TSV和SCT(软目标)之外,还可以管理所谓的虚拟元素(VE)。
• 根据需要支持其他制造商的转向,制动或驾驶机器人等组件(ABD,Vehico,Stähle等)。
• iSWACO-ARGUS软件包括您在试验场上进行PAD / HAD / FAD测试所需的一切,即:
1,iMAR独特的工具链可实现无缝的工作流程,从模拟仿真(OpenSCENARIO;其他如CarMaker等按需导入)的交通场景,到在试验场进行的实际测试,均符合PEGASUS的方法。
2,iMAR的iARGUS-CC控制中心带有iARGUS-CMD软件,可用于轨迹导入,适应试验场,验证和测试执行,安全监控,实时以及回放模式下的测试可视化,数据存储和数据导出。
3,iMAR的车辆定位和制导与控制硬件可用于10 ++个移动物体,即基于INS / GNSS / ODO技术和认知视觉来管理交通模拟车辆(TSV),软碰撞目标(SCT)和被测车辆(VUT) ,也可以在厘米级精度的GNSS拒绝测试区域(也可以在实际GNSS中断条件下测试VUT)中操作。还支持带有标准化接口的虚拟元素(VE)。
4,iMAR的交通模拟车辆iTSV-KIA-NIRO作为交钥匙解决方案,可在交通场景中进行无人驾驶操作(其他定制)。
5,基于INS / GNSS和可选iARGUS-MV机器视觉的iMAR碰撞预警和避免系统iARGUS-RCS。
6,iMAR的移动iDMN动态网状网络通信,对数据,视频和语音的延迟最小。还支持5G。
• 该实施方案涵盖了未来ISO 22133-1“道路车辆-主动安全性和自动/自动驾驶汽车测试的测试对象监视和控制”标准的建议。iMAR是ISO工作组的一部分。
• iSWACO-ARGUS的开发已由德国最大的公司之一PEGASUS内部提供支持测试,打算成为受测自动驾驶和自动驾驶汽车未来认证的基础达到SAE 5级,并由一家大型德国汽车制造商制造。
技术数据iSWACO-ARGUS
除非另有说明,否则所有数据均为RMS值
本地化性能(在每辆车上):iTraceRT-MVT-510或iTraceRT-MVT-200 / SLN
位置精度:2 cm [CEP] INS/GNSS/ODO, RTK
<0.1%总里程 丢失GNSS信号
速度的准确性: 0.02 m/s INS/GNSS/ODO
横滚/俯仰/航向精度: < 0.05° / 0.05° / 0.05° INS/GNSS/ODO,RTK
陀螺仪/加速性能iTraceRT-MVT-510:< 0.1 °/h / 0.2 mg day2day | < 0.01 °/h / 0.04 mg AV
陀螺仪/加速性能iTraceRT-MVT-200:< 3 °/h / 1 mg in motion | < 0.5 °/h / 0.06 mg AV
航向/横滚/俯仰范围:0…360° / ±180° / ±90°
角速率范围:±400 °/s
加速度范围:±10 g(其他可选)
数据输出速率/带宽;数据延迟:1…500 Hz / 200 Hz;<2毫秒延迟,1毫秒抖动
接口:
串行数据:3 x UART RS422或RS232(iXCOM,NMEA 0183)
以太网:1 x TCP / IP或UDP(通过iXCOM / NMEA的数据和状态)
CAN总线:标准协议(数据,状态)
GNSS校正数据输入:RTCM(来自iREF-GNSS,iREF-LITE,通过NTRIP或GSM) GNSS(GPS / GLonASS / BEIDOU / GALILEO):集成多星座,所有频率均支持
GNSS引擎(500个频道);单天线和双天线。
里程表输入:RS422电平(A / B)正交信号或脉冲fw./bw./dir
物理/操作/环境参数:
电源电压:12 V DC(10…35 V DC)
功耗:分别为25 W(iTraceRT-MVT-510)。10 W(iTraceRT-MVT-200)
尺寸:187 x 128 x 196毫米(-510)102 x 62 x 138毫米(-200)
重量:<5.7公斤(-510)<900克(-200)
工作/存储温度; 湿度:-40…+ 65°C / -45…+ 75°C;8…100%相对。
外壳/防护类别:全密封铝制外壳/ IP 67
配件:
包括:
- 图形用户界面iXCOM-CMD(Windows / Linux)
- 操作手册(使用和维护)
- 内部数据记录器(最大128 GByte),也用于车辆的诊断界面(CAN / ETH)
可选:
- 多套电缆,GNSS和RF天线固定装置,测试车辆上的不间断电源等,支持本地定位系统(例如LOCATA),试验场的机载实时视频监控
- PTP或NTP时间服务器功能
- iDMN动态网状网络,iARGUS-RCS(屋顶通信和传感器头)
标准:将来的ISO 22133-1(尚未通过ISO批准– iMAR是标准化工作组的成员)
*惯性传感器性能(偏置、噪声、比例因子精度、带宽等)越好,即使在某些GNSS中断或在城市峡谷中(例如,实现较低的测量标准偏差),系统性能也可以保持得更好。有关详细信息,请参见专用数据表。iTraceRT-MVT-60x,-510,-500和-200系列的汽车系统通过接口和硬件与我们的常用系统iNAT-RQT,-FSLG,-FSSG,-M200等完全兼容。
iARGUS-CMD:
从OpenScenario测试描述到实际测试执行以及结果协议生成,
控制您的工作流程-在每个试验场上,无论通道形状如何。
用于试验场的所有自动化组件(硬件和软件)均由iMAR设计和提供:
• 每辆车上的iMAR INS / GNSS本地化系统,即带有可选车辆控制系统(iARGUS-VCS)和不间断电源iARGUS-UPS的iTraceRT-MVT-510,iTraceRT-MVT-500或iTraceRT-MVT-M200。iTraceRT-MVT系列是专门为数据延迟最小的自动驾驶汽车设计的。基于认知视觉的立体相机系统iARGUS-MV可用于基于AI的环境感知。板载实时传感器数据监控和记录(内部和外部摄像机,麦克风,通过CAN的OBD等),并带有精确的时间戳。
• iMAR的iREF-GNSS RTK校正数据采集和分配系统可实现cm精度。
iMAR的基于动态网格的通信网络(iDMN),具有可选的加密多车对车和车对控制中心通讯。最小的数据延迟,反射缓解,快速重新获取和自配置设置。安装可以包括一个15 m的天线桅杆,移动热点或基于无人机的数据分发(飞行热点),并带有集成的稳定高清摄像机,以证明对地面测试场景的观察(支持全自动起飞,飞行和着陆;不间断运行时间长达12小时以上,作为选择)。
具有iARGUS-CMD软件的iMAR iARGUS-CC控制中心,用于测试设置,从OpenSCENARIO(选件)导入场景,每辆车的轨迹规划,仿真,测试执行,数据存储,设备监控;含可视化控制台,iDMN通信,可选。不间断电源和用于RTK校正的iREF-GNSS。
iMAR的交通模拟车辆,类型为iTSV-KIA-NIRO或类似型号,带有集成的执行器接口,作为通过iARGUS-VCS / iARGUS-LTG,基于iTraceRT-MVT的INS / GNSS / ODO本地化和iDMN-OHS动态网格的轨迹控制的交钥匙解决方案。示例:OEM车辆,奥迪RS7,起亚NIRO,其他按需(定制)。
将软目标(SCT)集成到测试设置中:4a Systems的目标(作为4activeFB),包括用于高精度定位,导航和控制的集成iTraceRT-MVT,或按需提供的DSD / Humanetics,ABD或DRI的其他目标。
测试准备,仿真,执行和记录:iARGUS-CMD中的工作流程:
1、场景规划,OpenX文件或其他格式的导入,预测试评估;
2、通过iDMN或5G将轨迹传输到每个目标的车辆控制器并进行测试仿真;
3、根据测试进度执行测试和在线轨迹适应;
4、测试评估和自动生成报告。
交通场景中所有集群车辆要执行的轨迹(可按需同时运行10 ++ VUT,TSV,SCT,VE)以及活动基础设施元素ISE的时间(更改交通信号灯时,限速信息) 等)由iARGUS-CC控制中心软件iARGUS-CMD生成,或自动从OpenSCENARIO(按需提供其他类似CarMaker之类)生成的数据集中导入并适应PG。
iMAR的轨迹导入、计划、仿真、测试执行、可视化和数据导出工具iARGUS-CMD:
示例:以100 g / h的横向加速度以0.5 g(!)的横向变化(横向3.75 m),以全自动模式(出厂扩展)驾驶OEM车辆(通过iMAR的带iARGUS-VCS的iTraceRT-MVT-200,包括执行器接口)在Zweibrücken的试验场上。



 广告
广告 编辑推荐




最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
